طرق تشغيل المحرك. المبادئ الأساسية للبدء الناعم
مشاكل البداية:تيار البدء العالي، وعزم الدوران المنخفض.
الدوار الحالي أنا 2 يتم تحديده من العلاقة
عند البدء،  ، أينأنا 2 ع و أنا 2 ن - تيارات البداية والدوار المقدرة، على التوالي.
، أينأنا 2 ع و أنا 2 ن - تيارات البداية والدوار المقدرة، على التوالي.
 ;
;  .
.
![]() .
.
يتم استخدام طرق البدء التالية: البدء المباشر، البدء بجهد منخفض، البدء بإدخال مقاومات نشطة إضافية في دائرة الدوار.
البداية المباشرة.يستخدم عند تشغيل المحركات في شبكات قوية. لم يتم توفير أي تدابير لزيادة عزم الدوران وتقليل تيار البدء.
بدءا من الجهد المنخفض. من أجل تقليل تيار البدء، يتم تقليل جهد الإمداد في الشبكات الضعيفة خلال فترة بدء التشغيل.
دعونا نفكر في خيارين لبدء تشغيل المحرك بجهد منخفض:
|
أرز. 3.21. دائرة بدء تشغيل المحرك ( أ) والميكانيكية
خصائص ضغط الدم ( ب). خيارأنا (1 - K مفتوحة؛
2 – رد = 0، ك مغلق)
الخيار الأول - بدء التشغيل عند إدخال مقاومات إضافية في دائرة الجزء الثابت (الشكل 3.21). أثناء بدء التشغيل، تكون K مفتوحة، وبعد بدء التشغيل تكون مغلقة. مع فتح ك.
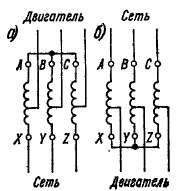
الخيار الثاني - بدء تشغيل المحرك عند تبديل ملفات الجزء الثابت من اتصال دلتا إلى اتصال النجم طوال مدة البداية (الشكل 3.22).
أرز. 3.22. دائرة بدء تشغيل المحرك ( أ) والميكانيكية
خصائص المحرك غير المتزامن ( ب).
الخيار الثاني
في لحظة البدء، يكون المفتاح في الموضع الصحيح ويتم توصيل ملفات الجزء الثابت على شكل نجمة. بعد بدء التشغيل، يتم ضبط المفتاح على الموضع الأيسر ويتم توصيل ملفات الجزء الثابت في مثلث. من التحليل دائرة ثلاثية الطورنجد أنه عند توصيل ملفات الجزء الثابت في نجم، فإن التيار المستهلك من الشبكة سيكون أقل بثلاث مرات منه عند توصيله في مثلث.
عيبتهدف كلتا الطريقتين إلى تقليل عزم الدوران عن طريق خفض الجهد على الجزء الثابت.
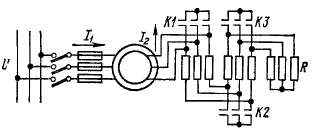
ابدأ عند إدخال مقاومات نشطة إضافية في دائرة الدوار. أثناء بدء التشغيل، يتم إدخال مقاومات إضافية إلى دائرة الجزء الدوار، والتي تتم إزالتها عند حدوث التسارع (الشكل 3.23).
أرز. 3.23. دائرة بدء تشغيل المحرك عند إدخال مقاومات نشطة إضافية في دائرة الدوار ( أ) والخصائص الميكانيكية للمحرك غير المتزامن ( ب): 1 - ل 1 و K2 مغلقان، رد = 0؛ 2 – K 1 مفتوح، K 2 مغلق، رد = رد2؛ 3 -K 1 و K 2 مفتوحان، رد = رد1+ رد2
تسمح لك هذه الطريقة بحل مشكلتي البداية، أي تقليل تيار البداية عن طريق زيادة مقاومة الدائرة وزيادة عزم الدوران. طريقة البدء هذه ممكنة فقط للمحرك المزود بدوار ملفوف.
يمكن تشغيل المحركات غير المتزامنة بجهد كامل (بدء التشغيل المباشر) أو بجهد منخفض. يتم البدء المباشر باستخدام قواطع الدائرة، والمفاتيح، مفاتيح الحزمةوالبادئات المغناطيسية والموصلات وأجهزة التحكم. أثناء التشغيل المباشر، يتم تزويد المحرك بجهد كامل للتيار الكهربائي. عيب طريقة البدء هذه هو تيارات البدء الكبيرة، والتي تكون أعلى بمقدار 2-7 مرات من التيارات المقدرة للمحركات.
أبسطها هو البداية المباشرة للمحركات غير المتزامنة الدوار قفص السنجاب. يتم تشغيل وإيقاف هذه المحركات عن طريق تشغيل أو إيقاف تشغيل المفتاح (بادئ التشغيل المغناطيسي)، وما إلى ذلك. في الشكل. 399 يُظهر دائرة البدء المباشر للأنظمة غير المتزامنة محرك قفص السنجاب. يتم بدء تشغيل المحركات غير المتزامنة باستخدام دوار الجرح
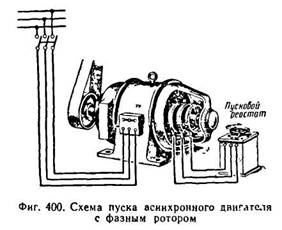
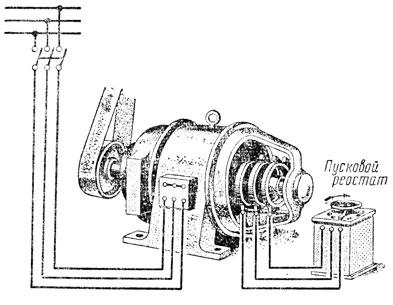
قدم بالكامل. في نهاية بدء التشغيل، تتم إزالة المقاومة المتغيرة بسلاسة وقصر الدائرة. يؤدي وجود مقاومة نشطة في الدائرة الدوارة أثناء بدء التشغيل إلى انخفاض تيار البدء وزيادة عزم الدوران. في الشكل. يُظهر الشكل 400 مخطط البداية لمحرك غير متزامن مع دوار ملفوف.
|
لتقليل تيارات البدء للمحركات غير المتزامنة، يتم تقليل الجهد الموفر للملفات الثابتة للمحرك.
دعونا نفكر في طريقتين لبدء تشغيل المحركات غير المتزامنة بجهد منخفض: استخدام مفتاح نجمة إلى دلتا واستخدام محول ذاتي.
ابدأ بـ
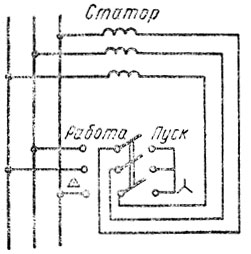
مفتاح ستار دلتا. في الشكل. يُظهر 401 رسمًا تخطيطيًا لتشغيل لف الجزء الثابت بمفتاح دلتا النجمي. عند البدء، يتم توصيل ملف الجزء الثابت بواسطة نجمة باستخدام مفتاح، وبمجرد وصول المحرك إلى أقصى سرعة دوران ممكنة لهذا الاتصال، يتم إمالة المفتاح إلى اليسار، ويتم توصيل ملف الجزء الثابت بواسطة مثلث ويتم توصيل المحرك قادر على الوصول إلى السرعة الكاملة. مع هذه الطريقة لبدء تشغيل المحرك، يتم تقليل تيار البدء بمقدار ثلاث مرات. دعونا نشرح ذلك بمثال.
|
كما يتبين من المثال أعلاه، فإن التيار الخطي للمحرك عندما تكون ملفات الجزء الثابت متصلة بواسطة نجمة أقل بثلاث مرات من التيار الخطي للمحرك، الذي يتم توصيل ملف الجزء الثابت به بواسطة دلتا.
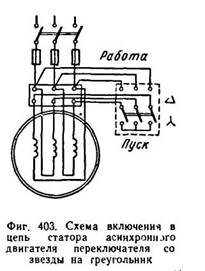
في الشكل. يُظهر الشكل 403 رسمًا تخطيطيًا لتوصيل مفتاح دلتا النجمي في الدائرة الثابتة للمحرك التعريفي.
إن طريقة تشغيل المحرك التي تناولناها تقلل من تيار البدء بمقدار ثلاث مرات، وبما أنه حسب ما تم إثباته أعلاه فإن عزم المحرك يتناسب مع تيار الجزء الدوار، وبالتالي تقريباً مع تيار الجزء الثابت، ثم في نفس الوقت يتم أيضًا تقليل عزم دوران المحرك بمقدار ثلاث مرات. لذلك، لا يمكن استخدام المحركات التي تستخدم طريقة التشغيل هذه إلا في الحالات التي يتم فيها تشغيلها في وضع الخمول أو التحميل الخفيف.
وغني عن القول أن تحويل ملف الجزء الثابت من النجم إلى الدلتا أثناء بدء التشغيل لا يمكن استخدامه إلا للمحركات التي تعمل عادةً بتكوين دلتا.
البدء باستخدام المحول الذاتي. يمكنك أيضًا تقليل الجهد الكهربي الموفر للمحرك، وفي نفس الوقت تقليل تيار بدء تشغيل المحرك باستخدام محول ذاتي.
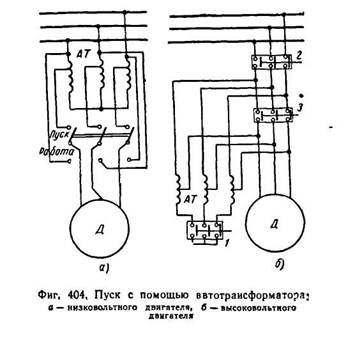
في الشكل. 404، ويعرض رسمًا تخطيطيًا لبدء تشغيل محرك غير متزامن منخفض الجهد D باستخدام محول ذاتي AT. تين. 404، ب يُظهر دائرة لبدء تشغيل محرك عالي الجهد. هنا يحتوي المحول الذاتي AT على نقطة صفر قابلة للفتح. لبدء تشغيل المحرك D، يتم تشغيل مفتاح الزيت 1، وبالتالي إغلاق نقطة الصفر للمحول الذاتي. ثم قم بتشغيل مفتاح الزيت الرئيسي 2؛ يتم توفير جهد منخفض للمحرك من خلال محول ذاتي من الشبكة ويبدأ المحرك في التحرك. عندما يصل المحرك إلى أقصى سرعة ممكنة (مع اتصال معين)، يتم إيقاف تشغيل مفتاح الزيت 1 وتشغيل مفتاح الزيت 3، مما يتسبب في حصول المحرك على جهد التيار الكهربائي الكامل وتطوير سرعة دوران عادية.
عند البدء، تقوم المحولات الذاتية بتقليل الجهد بنسبة 50-80%.
يمكن تشغيل المحركات غير المتزامنة بجهد كامل (بدء التشغيل المباشر) أو بجهد منخفض.
يتم البدء المباشر باستخدام المفاتيح والمفاتيح والمشغلات المغناطيسية وأجهزة البدء الأخرى.
أثناء التشغيل المباشر، يتم تزويد المحرك بجهد كامل للتيار الكهربائي. عيب طريقة البدء هذه هو تيارات البدء الكبيرة، والتي تكون أعلى بمقدار 2-7 مرات من التيارات المقدرة للمحركات.
أبسطها هو البداية المباشرة للمحركات غير المتزامنة باستخدام دوار قفص السنجاب. يتم تشغيل وإيقاف هذه المحركات عن طريق تشغيل أو إيقاف تشغيل المفتاح (بادئ التشغيل المغناطيسي)، وما إلى ذلك. يُظهر الشكل 261 رسمًا تخطيطيًا للبداية المباشرة لمحرك قفص السنجاب غير المتزامن.
لتقليل تيارات البدء للمحركات غير المتزامنة ذات الجزء الدوار ذو القفص السنجابي، يتم تقليل الجهد الكهربي الموفر لملفات الجزء الثابت للمحرك.
دعونا نلقي نظرة فاحصة على طريقة تشغيل المحركات غير المتزامنة بجهد منخفض باستخدام مفتاح دلتا النجمي.
في الشكل. يُظهر الشكل 262 رسمًا تخطيطيًا لتشغيل ملف الجزء الثابت بمفتاح دلتا النجمي. عند البدء، يتم توصيل لف الجزء الثابت بنجمة باستخدام مفتاح، وبمجرد أن يصل المحرك إلى أقصى سرعة دوران ممكنة، يميل المفتاح إلى اليسار، ويتم توصيل لف الجزء الثابت في مثلث. مع هذه الطريقة لبدء تشغيل المحرك، يتم تقليل تيار البدء بمقدار ثلاث مرات. دعونا نشرح ذلك بمثال.
في الشكل. 263، ويتم عرض ملف الجزء الثابت بشكل تخطيطي، وهو متصل أثناء بدء تشغيل النجم. دع الجهد بين الأسلاك الخطية للمحرك يكون 380 فولت، وبالتالي الجهد لكل مرحلة من مراحل المحرك عند بدء التشغيل:
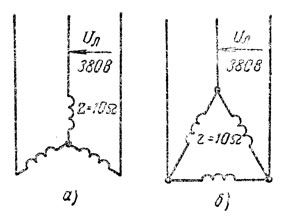
إذا كانت المقاومة الإجمالية لملف الطور للمحرك هي 10 أوم، فإن تيار الطور
منذ متى كانت متصلة بواسطة مثلث
أنا لΔ = أنا وΔ √3،
ثم المحرك في هذه الحالة سوف يستهلك تيار الخط من الشبكة
أنا lΔ = 38 ⋅ √3 = 66 أ.
كما يتبين من المثال الموضح، أثناء بدء التشغيل، يكون التيار الخطي للمحرك عندما تكون ملفات الجزء الثابت متصلة بنجمة أقل بثلاث مرات من التيار الخطي للمحرك، الذي يتم توصيل ملف الجزء الثابت به بواسطة دلتا.
وفقًا لطريقة البدء هذه، يتم تزويد المحرك مبدئيًا بجهد √3 مرات أقل من الجهد المقنن.
نظرًا لأن عزم الدوران للمحرك غير المتزامن يتناسب مع مربع الجهد الموفر (M ≡ U 2 1)، فإن انخفاض الجهد بمقدار √3 مرات سيؤدي إلى انخفاض في عزم الدوران بمعامل 3.
لذلك، لا يمكن استخدام طريقة البدء هذه إلا في الحالات التي يتم فيها تشغيل المحركات في وضع الخمول أو التحميل الخفيف.
وغني عن القول أن تحويل ملف الجزء الثابت من النجم إلى الدلتا أثناء بدء التشغيل لا يمكن استخدامه إلا للمحركات التي تعمل عادةً بتكوين دلتا.
يمكنك أيضًا تقليل الجهد الكهربي الموفر للمحرك، وفي نفس الوقت تقليل تيار بدء تشغيل المحرك باستخدام محول ذاتي.
يتم تشغيل المحركات غير المتزامنة ذات الدوار الملفوف باستخدام مقاومة متغيرة متصلة بالدوار المتعرج من خلال الحلقات والفرش. قبل بدء تشغيل المحرك، عليك التأكد من إدخال مقاومة مقاومة متغيرة التشغيل بالكامل. في نهاية بدء التشغيل، تتم إزالة المقاومة المتغيرة بسلاسة وقصر الدائرة. يؤدي وجود مقاومة نشطة في الدائرة الدوارة أثناء بدء التشغيل إلى انخفاض تيار البدء وزيادة عزم الدوران. في الشكل. يُظهر الشكل 264 مخطط البداية لمحرك غير متزامن مع دوار ملفوف.
المبادئ الأساسية بداية ناعمة. تتناول هذه الورقة طرق بدء تشغيل المحركات غير المتزامنة ومبادئ التحكم في سرعة الدوار الثابتة.
نص المقال
منذ اختراعه (منذ مائة عام)، أصبح المحرك الحثي القياسي ثلاثي الطور واحدًا من أكثر قطع المعدات الصناعية شهرة. ونظرًا لبساطة تصميمها وتكلفتها المنخفضة وموثوقيتها وكفاءتها العالية نسبيًا، فمن المرجح أن تظل المصدر الرئيسي للطاقة الميكانيكية للتطبيقات الصناعية.
مقدمة
إن تحويل الطاقة من مصدر الطاقة إلى طاقة ميكانيكية دوارة هو الغرض الرئيسي لجميع المحركات. لتنظيم تدفق الطاقة، تحتاج معظم الدوائر الحركية إلى آلية لتوصيلها وفصلها عن المصادر الكهربائية، والمفاتيح الكهروميكانيكية المعروفة بالموصلات هي الوسيلة القياسية لتحقيق هذا التحكم. حتى اليوم، بعد مرور أكثر من مائة عام على طرحها، تظل أنظمة الموصلات هي أكثر طرق التحكم في المحركات استخدامًا. ومع ذلك، هناك اتجاه واضح نحو أكثر تعقيدا الأنظمة الإلكترونيةالضوابط المستخدمة لتثبيت سرعة المحرك وهنا سنناقش أحدث أشكال التحكم، وهي التحكم الإلكتروني، والتحكم في المعالجات الدقيقة، وتحسين التشغيل الناعم.
محرك غير متزامن
من أجل تقدير فوائد استخدام وحدة التحكم الإلكترونية، من المهم أن يكون لديك بعض الفهم لخصائص وقيود المحركات الحثية والأنظمة الكهروميكانيكية المستخدمة حاليًا للتحكم فيها. يجب أن تفي الأنظمة القياسية لتحديد سرعة المحرك غير المتزامن بمتطلبين أساسيين: القدرة على التسارع بدون الحمل ومعه؛ الحفاظ على السرعة الكاملة مع الحمل. ونظرًا للقيود المفروضة على المواد والتصميم، يصعب تحقيق هذه الأهداف بكفاءة واقتصادية في جهاز واحد.
كيف يبدأ المحرك غير المتزامن؟
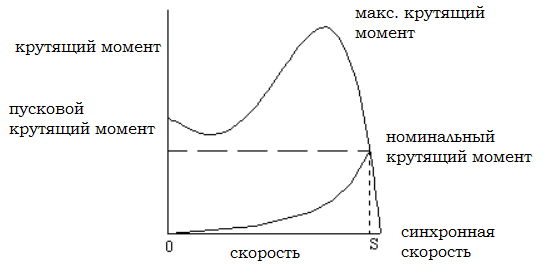
كما ذكرنا سابقًا، تقوم المحركات بتحويل الطاقة الكهربائية من الشبكة الكهربائية إلى شكل ميكانيكي، وعادة ما تكون على شكل عمود دوار بسرعة تتوافق مع تردد الإمداد. الطاقة الموجودة في عمود المحرك تساوي عزم الدوران (عزم الدوران) مضروبًا في سرعة العمود (دورات في الدقيقة). من القيمة الأولية عند السكون، يزداد عزم الدوران ويتناقص مع التسارع، ويبلغ ذروته عند حوالي ثلثي السرعة الكاملة، ويصل أخيرًا إلى الصفر عند السرعة المتزامنة. تعني هذه الخاصية أن المحركات غير المتزامنة تعمل دائمًا بسرعة أقل قليلًا من السرعة المتزامنة من أجل تطوير الطاقة - سرعة "الانزلاق"، ومن هنا جاء المصطلح غير المتزامن. يوضح الرسم البياني أدناه (الشكل 1) منحنى عزم الدوران إلى السرعة للمحرك التعريفي.
الشكل 1 - الخصائص الميكانيكية للمحرك غير المتزامن
تحميل على محرك كهربائي غير متزامنله نسبة السرعة إلى عزم الدوران والمنحنى الخاص به (الشكل 2).
الشكل 2 - الخصائص الميكانيكية للمحرك غير المتزامن (بالاشتراك مع الحمل)
يحدث تسارع نظام حمل المحرك بسبب الفرق بين عزم الدوران (المحرك) وعزم الدوران الممتص (الحمل)، وهو موضح في المنطقة المظللة في الشكل 3.

الشكل 3 - الخصائص الميكانيكية للمحرك غير المتزامن (عزم التسارع)
ومن الواضح أنه كلما زاد الفرق، كلما حدث التسارع بشكل أسرع ويصل المحرك إلى السرعة المقدرة بشكل أسرع. البداية "المثالية" من شأنها تسريع الحمل بقوة كافية للوصول إلى السرعة القصوى بسلاسة وفي الوقت المناسب مع الحد الأدنى من الجهد المطبق على المحرك.
بشكل عام، تعتمد نسبة سرعة المحرك إلى عزم الدوران على مقاومة الدوار - المحرك ذو المقاومة العالية للدوار سينتج أقصى عزم دوران (عزم الدوران المماطلة)، والمحرك ذو مقاومة الدوار المنخفضة جدًا سينتج عزم دوران منخفض عند التشغيل ولكنه سيولد أقصى عزم دوران أقرب إلى سرعة متزامنة.
بدء تشغيل المحركات غير المتزامنة
يعد بدء تشغيل محرك غير متزامن منزوع المغناطيسية عملية مهمة ومعقدة. في لحظة التشغيل، يتم إنفاق الطاقة اللازمة لجذب المحرك وتوفير التسارع، بالإضافة إلى كل هذا، ميكانيكيًا و الخسائر الكهربائية. يمكن أن يؤدي التسارع المفرط للدوار تحت الحمل الميكانيكي إلى اختلافات صغيرة في عزم دوران العمود ويسبب تآكلًا شديدًا في ناقل الحركة والتروس.
طرق البدء الكهروميكانيكية
الطريقة أ: البدء المباشر
إن أبسط طريقة للتحكم في طاقة التدفق للمحرك التعريفي هي قطع الطاقة باستخدام جهاز التحكم الكهرومغناطيسي، وهو مفتاح ثلاثي الطور يُعرف باسم الموصل. تُستخدم هذه الطريقة على نطاق واسع جدًا وهي شكل شائع من أشكال الإدارة حيث تكون التكلفة المنخفضة هي العامل الأول والأكثر أهمية. ونتيجة لذلك، يتم استخدام هذه الطريقة غالبًا في المحركات الكهربائية الصغيرة (7.5 - 22 كيلو واط)، أو عندما تكون الخاصية قوية بما يكفي لتحمل الانتفاخ وارتفاعات بدء التشغيل دون التسبب في انخفاض غير مقبول في الجهد. طريقة البدء هذه ليست عقلانية وتضر بالمعدات. تبدو بساطتها وتكلفتها المنخفضة الواضحة جذابة للوهلة الأولى، ولكنها تخفي عيوبًا كبيرة، والتي تشمل انخفاض عمر محرك الأقراص وزيادة خطر فشل التشغيل، خاصة عند الحاجة إلى بدء التشغيل والتوقف بشكل متكرر. لقد تم التعرف على عيوب التشغيل المباشر منذ أن بدأ استخدام المحركات، وتم تطوير أنظمة بديلة لتقليل الآثار الضارة لبدء التشغيل المباشر.
الطريقة ب: دائرة البداية دلتا النجمية
يوفر البدء بـ Star-delta عزم دوران مخفضًا، ولكنه يأخذ في الاعتبار أن عزم الحمل يتناسب مع مربع السرعة. يتم تزويد جميع مشغلات ستار دلتا بوحدات تأخير زمنية خاصة والتي تخلق تأخيرًا في موصل دلتا الضروري لفتح موصل النجمة. يتم التحكم في لحظة الانتقال بواسطة مؤقت، وعادة ما تكون 80٪ من السرعة المقدرة. تأثير هذه الطريقة هو تغيير الجهد على كل ملف من ملفات الجزء الثابت إلى 58% من الجهد الاسمي. يؤدي هذا إلى تقليل عزم الدوران بمقدار الثلث مع ما يترتب على ذلك من انخفاض في تيارات البدء والقوة المتسارعة. الميزة على البدء المباشر واضحة، ولكن لا تزال هناك عيوب كبيرة.
يؤدي التغيير من النجم إلى الدلتا إلى قطع الطاقة عن المحرك للحظات. خلال هذا الوقت، يكون المحرك تحت التأثير الميكانيكي للحمل الدوار، وفي لحظة إيقاف التشغيل، سوف يتدفق التيار في القضبان الدوارة بسبب وقت التأخير المطلوب لاضمحلال التدفق المغناطيسي. وبالتالي، هناك تدفق مغناطيسي متبقي على سطح الدوار الدوار. إذا كان القصور الذاتي للحمل منخفضًا، كما هو الحال في المضخة، أو إذا كانت قوة الاحتكاك عالية، فقد يحدث فقدان كبير للسرعة أثناء وقت إيقاف تشغيل المحرك.
يمكن أن يؤدي هذا إلى تيارات تدفق كبيرة جدًا (نفس أو أعلى من الجزء الدوار المقفل)، مقترنة بتموج عزم الدوران العابر الهائل. على الرغم من أن التأثيرات الموصوفة لا تظهر إلا لفترة زمنية قصيرة جدًا (حوالي خمس الثانية)، إلا أنها تشكل مصادر تآكل شديد لنظام القيادة بأكمله، خاصة عند الحاجة إلى عمليات تشغيل متكررة.
الطريقة ج: الطريقة الريوستاتيكية
لقد تم الاعتراف منذ فترة طويلة بأن نظام ستار-دلتا كان مصدرًا لمشاكل مثل الموصلات الملحومة، وسوء محاذاة أعمدة القيادة، وما إلى ذلك، ولسنوات عديدة كانت الطريقة المتغيرة لتقليل السرعة متاحة. يتم استخدام هذه الطريقة في ظل ظروف البداية الصعبة، أي. مع حمولة كبيرة على رمح. لبدء التشغيل المتغير، يتم استخدام المحركات غير المتزامنة مع الدوار الجرح؛ يتم توصيل مقاومة متغيرة بدائرة الدوار. يعمل البدء المتغير على زيادة عزم الدوران. في نفس الوقت ، يتناقص تيار بدء تشغيل المحرك. مع تسارع المحرك، تتم إزالة مقاومة متغيرة التشغيل وبعد اكتمال البداية، يتم قصر دائرة لف الدوار.
الطريقة د: الأنظمة الكهروميكانيكية الأخرى
يتم استخدام طرق التحكم الأخرى، مثل بدء تشغيل المحولات الذاتية (الشائعة في أمريكا الشمالية)، وبدء التفاعل، وما إلى ذلك، بدرجة أكبر أو أقل للتعويض عن بعض المضايقات لكل نوع من أنواع البادئات التي تمت مناقشتها أعلاه. ومع ذلك، لا تزال هناك مشاكل أساسية تتعلق بالمشغلات الكهروميكانيكية. يتم حل هذه المشاكل باستخدام محولات أشباه الموصلات.
تحكم أشباه الموصلات
خلال الخمسينيات من القرن الماضي، تم بذل الكثير من الجهود لتطوير جهاز ترانزستور من أربع طبقات لديه القدرة على تحويل التيارات الكبيرة من الجهد العالي. أصبح هذا الجهاز معروفًا باسم المقوم المتحكم فيه بالسيليكون، وفي أوروبا أصبح يعرف باسم الثايرستور؛ هذا هو الأساس الذي تبنى عليه كل البدايات الناعمة. الأكثر أهمية هو قدرة الثايرستور على التبديل بسرعة (حوالي 5 أجزاء من المليون من الثانية) من حالة "الإيقاف" إلى وضع "التشغيل" الذي يستمر حتى ينخفض التيار عبر الجهاز إلى الصفر وهذا مريحة للغاية. من خلال التحكم في الثايرستور من الممكن تنظيم الطاقة التي تمر عبر الجهاز. من خلال فتح الثايرستور بتأخير زمني أكبر أو أقل، من الممكن "قطع" الجزء المقابل من جهد الإمداد الجيبي. وبالتالي، فإن متوسط الجهد عند خرج الجهاز سوف يتغير بما يتناسب مع التغير في زمن تأخير فتح الثايرستور. نظرًا لأن مبدأ تنظيم الجهد يفترض أنه خلال تلك الفترات الزمنية التي يظل فيها الثايرستور مغلقًا، لا يتدفق التيار عبر ملفات المحرك، ولا يتم أخذ الطاقة من شبكة الإمداد في هذه اللحظات. يدور دوار المحرك بالقصور الذاتي خلال هذه الفترات الزمنية.
بدء تشغيل المحركات غير المتزامنة
عند تشغيل المحرك عند أو بالقرب من أقصى حمل له، يكون المحرك التعريفي ثلاثي الطور النموذجي فعالًا نسبيًا، حيث تزيد الكفاءة من 85% إلى 95%. ومع ذلك، كما هو موضح أدناه (الشكل 4)، تنخفض كفاءة المحرك بشكل حاد عندما ينخفض الحمل إلى أقل من 50% من الطاقة المقدرة.
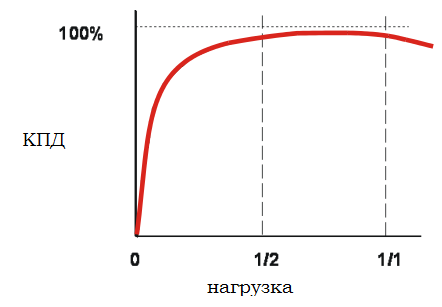
الشكل 4 - اعتماد الكفاءة على الحمل
في الواقع، هناك عدد قليل جدًا من المحركات التي تتمتع بالتشغيل الكامل، والغالبية العظمى منها تعمل بحمل أقل بكثير. للجماهير و وحدات الضخ، التحكم في محرك الحالة الصلبة، يوفر توفيرًا كبيرًا جدًا في الطاقة مقارنة بجميع طرق التحكم الأخرى تقريبًا من خلال تغيير سرعة المحرك استجابة لتغيرات الحمل. أقل أنظمة معقدةتستمر أجهزة التشغيل الناعمة في العمل بالتوصيل الكامل ويتصرف المحرك كما لو كان متصلاً مباشرة بمصدر التيار الكهربائي. ومع ذلك، عند الأحمال المنخفضة وفولتية الإمداد، يكون هناك دائمًا تدفق زائد في المحرك التعريفي، مما يؤدي إلى فقدان الكفاءة وانخفاض عامل الطاقة. من خلال اكتشاف الحمل في أي وقت وتغيير الجهد الطرفي للمحرك وفقًا لذلك، يمكن توفير بعض طاقة الإثارة والحمل ويمكن تحسين عامل قدرة المحرك عندما يعمل المحرك بشكل غير فعال تحت الأحمال الخفيفة.
يتم التحكم في جميع المبتدئين بواسطة معالج دقيق وهذا يمنحهم العديد من المزايا. أولاً، ليست هناك حاجة لإجراء تعديلات على وظيفة توفير الطاقة: يتم إجراء جميع الحسابات اللازمة للعثور على أفضل مرحلة لضبط مرحلة إطلاق الثايرستور عند أي حمل بواسطة المتحكم الدقيق. ثانيًا، تتم مزامنة البداية دائمًا مع جهد الإمداد وبالتالي تقضي فعليًا على التيار المفاجئ المرتبط بالبدء.
الفصل الثامن والعشرون تشغيل المحركات الحثية ثلاثية الطور وتنظيم سرعة دورانها
§ 28-1. طرق تشغيل المحركات غير المتزامنة
الخصائص العامة للمسألة. البداية المباشرة.عند النظر في الطرق الممكنة لبدء تشغيل المحركات غير المتزامنة، يجب أن تؤخذ الأحكام الأساسية التالية بعين الاعتبار: 1) يجب أن يطور المحرك عزم دوران كبير بما فيه الكفاية عند بدء التشغيل، والذي يجب أن يكون أكبر من عزم الدوران الثابت على العمود بحيث يكون المحرك يمكن أن يبدأ الدوار في التدوير والوصول إلى سرعة الدوران المقدرة؛ 2) يجب أن يقتصر حجم تيار البداية على هذه القيمة بحيث لا يكون هناك أي ضرر للمحرك وتعطيل التشغيل العادي للشبكة؛ 3) يجب أن تكون دائرة بدء التشغيل بسيطة قدر الإمكان، من حيث الكمية والتكلفة أجهزة البدء- صغير.
عند بدء تشغيل محرك غير متزامن في وضع الخمول، يتم إطلاق جهد في المقاومة النشطة لدائرته الثانوية. الطاقة الحرارية، تساوي الطاقة الحركية لكتل دولاب الموازنة المدفوعة في الدوران، وعند البدء تحت الحمل، تزداد كمية الطاقة المنطلقة وفقًا لذلك. عادةً ما يكون إطلاق الطاقة في الدائرة الأولية أكبر قليلاً منه في الدائرة الثانوية. مع عمليات التشغيل المتكررة، وكذلك في ظل ظروف البدء الصعبة للغاية، عندما تكون كتل دولاب الموازنة للآليات المدفوعة كبيرة، يكون هناك خطر ارتفاع درجة حرارة ملفات المحرك وديناميكيات حركة المحرك الكهربائي وعلاقات الطاقة أثناء البدء -تتم مناقشة ما يلي بالتفصيل في دورات القيادة الكهربائية. عدد مرات تشغيل المحرك غير المتزامن في الساعة، المسموح به وفقًا لظروف تسخينه، كلما زادت القوة المقدرة للمحرك، وصغرت كتل دولاب الموازنة المتصلة بعموده. محركات بقوة 3-10 . كيت V الظروف العاديةالسماح بما يصل إلى 5-10 الادراج Vساعة.
تعد المحركات غير المتزامنة ذات الدوار القفصي السنجابي أبسط في التصميم والصيانة، كما أنها أرخص وأكثر موثوقية في التشغيل من المحركات ذات الدوار الملفوف.
لذلك، حيثما أمكن، يتم استخدام محركات القفص السنجابي، والغالبية العظمى من المحركات التحريضية المستخدمة هي محركات القفص السنجابي.
إن أبسط طريقة لبدء تشغيل محرك القفص السنجابي هي توصيل ملف الجزء الثابت الخاص به مباشرةً بالشبكة، الجهد المقنناللفات الجزء الثابت (الشكل 28-1، أ). هذا النوع من البداية يسمى المباشر.
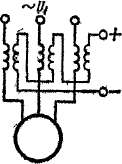
أرز. 28-1. مخططات لطرق بدء تشغيل المحركات باستخدام دوار القفص السنجابي: أ- مستقيم؛ ب - مفاعل. V- محول ذاتي ز- مع تبديل نجمة دلتا
في هذه الحالة، يبدأ تشغيل المحرك الحالي / = (4 h - 7.0) / n.
تم تصميم المحركات غير المتزامنة الحديثة ذات الدوار القفص السنجابي بطريقة تسمح ببدء التشغيل المباشر بناءً على حجم القوى الكهروديناميكية المؤثرة على اللفات أثناء بدء التشغيل وظروف تسخين اللفات. لذلك، يكون البدء المباشر ممكنًا دائمًا عندما تكون الشبكة قوية بدرجة كافية ولا تتسبب تيارات بدء التشغيل للمحركات في حدوث انخفاضات كبيرة غير مقبولة في الجهد في الشبكة (لا تزيد عن 10-15٪). عادةً ما تتمتع أنظمة الطاقة الحديثة والشبكات والمحطات الفرعية لمحولات الشبكة بقدرات تجعل من الممكن في الغالبية العظمى من الحالات البدء المباشر للمحركات غير المتزامنة.
وبالتالي فإن الطريقة العادية لبدء تشغيل المحركات ذات القفص السنجابي هي البدء المباشر.
غالبًا ما يتم تشغيل المحركات التي تبلغ قوتها آلاف الكيلووات بهذه الطريقة.
إذا كان من المستحيل، بسبب ظروف انخفاض الجهد في الشبكة، التشغيل المباشر للمحرك باستخدام دوار القفص السنجابي، فاستخدم طرق مختلفةبدء تشغيل المحرك بجهد منخفض (الشكل 28-1، ب، ج، د).ومع ذلك، في هذه الحالة، بما يتناسب مع مربع الجهد عند أطراف لف الجزء الثابت أو مربع تيار بدء المحرك، يتم أيضًا تقليل عزم الدوران، وهو ما يعد عيبًا عند البدء بجهد منخفض.
لذلك، تكون طرق التشغيل هذه قابلة للتطبيق عندما يكون من الممكن بدء تشغيل المحرك في وضع الخمول أو تحت الحمل الجزئي. غالبًا ما تحدث الحاجة إلى البدء بجهد منخفض مع المحركات القوية ذات الجهد العالي.
بدء تشغيل المفاعلنفذت وفقا للمخطط في الشكل. 28-1, ب.أولاً يتم تشغيل المفتاح ب1،ويستقبل المحرك الطاقة من خلال مفاعل ثلاثي الطور (الممانعة أو الملف الحثي) ص،الذي مقاومته × صيحد من كمية البداية الحالية. عند الوصول إلى سرعة الدوران العادية، يتم تشغيل المفتاح ب2،مما يؤدي إلى تحويل المفاعل، مما يؤدي إلى إمداد المحرك بجهد كهربائي عادي.
عادةً ما تُبنى مفاعلات البداية بنواة مغنطيسية حديدية (انظر الفقرة 18-4) وهي مصممة للتسخين فقط بواسطة العمل على المدى القصيرمما يقلل من وزنها وتكلفتها. بالنسبة للمحركات القوية جدًا، يتم أيضًا استخدام المفاعلات التي لا تحتوي على قلب مغنطيسي حديدي، مع ملفات مثبتة على إطار خرساني. يُحوّل ب1تم تحديده لقوة الفصل التي تسمح لك بإيقاف تشغيل المحرك في حالة وجود دائرة قصر ميتة خلف المفتاح، والمفتاح ب2قد يكون لها قوة كسر منخفضة.
إذا كانت مكونات مقاومة الدائرة القصيرة للمحرك تساوي r و س ك,ثم تيار البدء الأولي للبدء المباشر
وأثناء بدء تشغيل المفاعل، إذا تم إهمال المقاومة النشطة للمفاعل،
وبالتالي، أثناء بدء تشغيل المفاعل، ينخفض تيار البدء الأولي بمقدار
مرة واحدة. كما ينخفض الجهد عند أطراف المحرك في اللحظة الأولى لبدء التشغيل بنفس المقدار. يتناقص عزم الدوران الأولي أثناء بدء تشغيل المفاعل M p.r مقارنة بعزم الدوران أثناء البدء المباشر م ص V
النسب المذكورة أعلاه لا تأخذ في الاعتبار التغير في القيمة س كعندما يتغير تيار البداية. إذا لزم الأمر، فمن السهل أن تأخذ هذا التغيير في الاعتبار.
بدء المحول التلقائينفذت وفقا للمخطط في الشكل. 28-1، ب بالترتيب التالي. يتم تشغيل المفاتيح أولاً ب1و ب2،وإلى المحرك عبر محول ذاتي فييتم توفير الجهد المنخفض. بعد أن يصل المحرك إلى سرعة معينة، التبديل ب2ينطفئ ويتلقى المحرك الطاقة من خلال جزء من ملف المحول الذاتي في،والذي يعمل في هذه الحالة كمفاعل. وأخيرا يتم تشغيل المفتاح فز،مما يجعل المحرك يستقبل الجهد الكامل.
يُحوّل ب1يجب أن يتم اختياره لقدرة كسر الدائرة القصيرة، وقواطع الدائرة ب2و VZقد يكون لها صلاحيات قطع أقل. تم تصميم المحولات التلقائية للتشغيل على المدى القصير. وفقًا لـ GSST 3211-46، يجب أن يكون لبدء المحولات الذاتية فروعًا تتوافق مع قيم الجهد الثانوي التي تساوي 73 و64 و55% من الجهد الأساسي في دائرة اتصال مباشر و45 و36 و27% في دائرة توصيل عكسي (الشكل 1). 28-2). وفي كل حالة محددة، يتم تحديد مستوى الجهد المناسب.
إذا كان محول التشغيل التلقائي يقلل من جهد بدء تشغيل المحرك بمقدار & في بعض الأحيان، فإن تيار البدء في المحرك أو على الجانب نالمحول الذاتي / ″ يتناقص أيضًا في ك أ.تمرات، ويكون تيار البدء على جانب الجهد العالي للمحول الذاتي أو في الشبكة 1 ملاحظةيتناقص في ك" تمرة واحدة. عزم الدوران البداية م ع،يتناسب أيضًا مع مربع الجهد عند أطراف المحرك كل تيمرة واحدة -
وهكذا، مع بدء تشغيل المحول التلقائي م صو/النقصان بنفس عدد المرات. في الوقت نفسه، أثناء بدء تشغيل المفاعل، يكون تيار البدء للمحركات / p d هو أيضًا تيار البدء في الشبكة / p s وعزم الدوران المبدئي م"يتناقص بشكل أسرع من تيار البداية (التربيعي). لذلك، مع نفس قيم / n s أثناء بدء تشغيل المحول الذاتي، سيكون عزم الدوران أكبر. ومع ذلك، يتم تحقيق هذه الميزة لبدء تشغيل المحول الذاتي على حساب تعقيد وزيادة تكلفة بدء تشغيل المعدات بشكل كبير. لذلك، يتم استخدام بدء تشغيل المحول الذاتي بشكل أقل تكرارًا من بدء تشغيل المفاعل، في ظل ظروف أكثر قسوة، عندما لا يوفر بدء تشغيل المفاعل عزم الدوران المطلوب لبدء التشغيل.
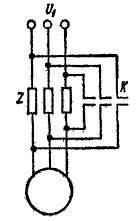
بداية النجم- مثلث"(الشكل 28-1، د) يمكن استخدامه في الحالات التي تتم فيها إزالة جميع الأطراف الستة لملف الجزء الثابت ويعمل المحرك بشكل طبيعي مع توصيل ملف الجزء الثابت بشكل مثلث، على سبيل المثال، عندما يكون المحرك 380/220 Vومع اتصال متعرج Y/A يعمل من شبكة 220 V.في هذه الحالة، عند البدء، يتم تحويل لف الجزء الثابت إلى نجمة (الموضع السفلي للمفتاح صفي الشكل. 28-1، د)، وعند الوصول إلى سرعة الدوران العادية، يتحول إلى المثلث (الموضع العلوي للمفتاح صفي الشكل. 28-1, ز).مع طريقة البدء هذه، مقارنة بالبدء المباشر، عندما يتم توصيل الملف في مثلث، ينخفض جهد الطور للملفات بمقدار V"3 مرات، وينخفض عزم الدوران بمقدار (]/3) a = 3 مرات، ويقل تيار البدء في مراحل اللف يتناقص بنسبة ص%مرات، وفي الشبكة - ي/З -1/3 = 3 مرات. وبالتالي، فإن طريقة البدء قيد النظر تعادل المحول الذاتي الذي يبدأ عند & at = ]/31.
عيب طريقة البدء هذه مقارنة بطرق المفاعل والمحول الذاتي هو أنه أثناء بدء تشغيل المفاتيح، يتم كسر دائرة المحرك، وهو ما يرتبط بحدوث تبديل الجهد الزائد. ومع ذلك، كانت هذه الطريقة تُستخدم سابقًا على نطاق واسع عند بدء تشغيل المحركات ذات الجهد المنخفض معمع زيادة قوة الشبكة، فقدت أهميتها السابقة ويتم استخدامها الآن بشكل نادر نسبيًا.
بدء تشغيل محرك دوار الجرح باستخدام بداية ريوالقانون الأساسي.يتم استخدام المحركات ذات الدوار الملفوف بشكل أقل تكرارًا من المحركات ذات الدوار القفص السنجابي. يتم استخدامها في الحالات التالية: 1) عندما تكون محركات القفص السنجابي غير مقبولة في ظل ظروف تنظيم سرعة دورانها (انظر الفقرة 28-2)؛ 2) عندما تكون لحظة المقاومة الثابتة على العمود عند بدء التشغيل M st كبيرة وبالتالي المحرك غير المتزامن معالدوار ذو الدائرة القصيرة مع البدء بجهد منخفض أمر غير مقبول، والبدء المباشر لمثل هذا المحرك غير مقبول في ظل ظروف تأثير تيارات البدء الكبيرة على الشبكة؛ 3) عند توفرها
تكون الكتل المتحركة كبيرة جدًا لدرجة أن الطاقة الحرارية المنبعثة في الدائرة الثانوية للمحرك تسبب تسخينًا غير مقبول للملف الدوار على شكل قفص سنجاب.
يتم تشغيل المحركات ذات الدوار المجروح باستخدام مقاومة متغيرة في دائرة الدوار (الشكل 28-3). يتم استخدام مقاومات الأسلاك، مع عناصر الحديد الزهر، وكذلك المقاومات السائلة. وفقا لظروف التدفئة، تم تصميم المقاومات للتشغيل على المدى القصير. عادة ما يتم وضع مقاومات المقاومة المتغيرة المعدنية للتبريد في خزان به زيت المحولات. يتم تصعيد المقاومة المتغيرة المعدنية، ويتم التبديل من مرحلة إلى أخرى إما يدويًا باستخدام مقبض التحكم، والعنصر الأساسي فيه عبارة عن عمود مزود بملامسات متصلة به، أو تلقائيًا (في التركيبات الآلية) باستخدام موصلات أو وحدة تحكم تعمل بالكهرباء . مقاومة متغيرة سائلة معهو وعاء به إلكتروليت (على سبيل المثال، محلول مائي من الصودا أو ملح الطعام)، حيث يتم إنزال الأقطاب الكهربائية. يتم ضبط مقاومة المقاومة المتغيرة عن طريق تغيير عمق غمر الأقطاب الكهربائية.
دعونا نفكر في بدء تشغيل محرك باستخدام دوار ملفوف باستخدام مقاومة متغيرة معدنية متدرجة (الشكل 28-3)، يتم التحكم فيها عن طريق الموصلات ل-
قبل البدء، يجب إنزال الفرش على حلقات انزلاق الدوار، وتشغيل جميع مراحل المقاومة المتغيرة. وبعد ذلك، أثناء عملية بدء التشغيل، يتم تشغيل الموصلات واحدًا تلو الآخر كز، ك2، ك1-خصائص عزم دوران المحرك م= / (s) والتيار الثانوي / 2 = = / (s) عند التشغيل في مراحل مختلفة من المقاومة المتغيرة موضحة في الشكل. 28-4، أ و ب. لنفترض أنه تم تحديد مقاومات مراحل مقاومة البداية والفواصل الزمنية لمراحل التبديل بحيث يتم تحديد عزم دوران المحرك معند بدء التشغيل يختلف من M ma((C معين إلى M min معين وعند الاتصال بالشبكة م ع = M ماكس > L4 SG (منحنى 3 في الشكل. 28-4، أ). في بداية التشغيل يعمل المحرك حسب الخاصية 3, يبدأ الجزء المتحرك بالدوران، ويبدأ الانزلاق s في التناقص، وعند s = s 3، متى م= M MI n> تم تحويل المتغير إلى المرحلة الثانية. في هذه الحالة، سيعمل المحرك وفقًا للخاصية 2، ومع زيادة تشغيل المحرك، سيقل الانزلاق من ق = س 3ل ق - ق 2،واللحظة - من "القيمة م= م شككل م =م دقيقة. ثم يتم التبديل إلى المرحلة الأولى، وما إلى ذلك بعد ذلك
أرز. 28-3. مخطط لبدء تشغيل محرك غير متزامن باستخدام مقاومة متغيرة
عند إيقاف المرحلة الأخيرة من المقاومة المتغيرة، يتحول المحرك إلى العمل وفقًا لخصائصه الطبيعية 0 ويصل إلى سرعة دوران ثابتة.
إذا كان المحرك به آلية قصر الدائرة، بعد الانتهاء من التشغيل، يتم رفع الفرش من حلقات الانزلاق باستخدام هذه الآلية ويتم قصر الحلقات، ويعود المتغير إلى وضع البداية. وهذا يجعل معدات الإطلاق جاهزة للإطلاق التالي. تجدر الإشارة إلى أنه من الصعب تنفيذ التحكم عن بعد في آلية ماس كهربائى للحلقة الانزلاقية؛ يجعل الأمر صعبًا
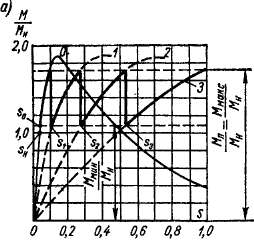
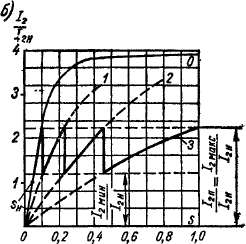
الشكل 28-4 تغييرات عزم الدوران المتتابعة (أ)والتيار (ب) البداية المتغيرة لمحرك غير متزامن
التحكم الآلي في المحرك. ولذلك، في السنوات الأخيرة، تم بناء المحركات غير المتزامنة الطورية بدون مثل هذه الآليات. من أجل تبسيط دائرة البداية وتقليل تكلفة المعدات في التركيبات الآلية، تم اختيار عدد مراحل مقاومة البدء لتكون صغيرة (عادة 2-3 مراحل).
تعتبر خصائص البدء للمحرك غير المتزامن مع بدء التشغيل المتغير أكثر ملاءمة، حيث يتم تحقيق قيم عزم الدوران العالية عند قيم تيار البدء المنخفضة.
لم تتم مناقشة قضايا حساب مقاومة متغيرات البداية في هذا الكتاب (انظر).
التشغيل الذاتي للمحركات غير المتزامنة V الشبكات الكهربائيةنتيجة ل دوائر قصيرةعلى المدى القصير، الذي يستمر لعدة ثوان، يحدث انخفاض كبير في الجهد أو انقطاع التيار الكهربائي. تبدأ المحركات غير المتزامنة المتصلة بالشبكة في التباطؤ وفي أغلب الأحيان بشكل كامل
قف. عند استعادة الجهد، يبدأ التشغيل الذاتي المتزامن لجميع المحركات التي تم فصلها عن الشبكة. يساهم هذا التشغيل الذاتي للمحركات في استعادة التشغيل العادي لآليات الإنتاج بشكل أسرع، وبالتالي يُنصح به، بل وفي بعض الحالات مرغوب فيه للغاية. ومع ذلك، فإن التشغيل الذاتي المتزامن لعدد كبير من المحركات غير المتزامنة يؤدي إلى تحميل الشبكة بتيارات كبيرة جدًا، مما يؤدي إلى انخفاض كبير في الجهد فيها وتأخير عملية استعادة الجهد الطبيعي. وفي هذه الحالة يزداد وقت التشغيل الذاتي للمحرك، وفي بعض الحالات يكون عزم البدء غير كافي لبدء تشغيل المحرك. بالإضافة إلى ذلك، فإن التشغيل الذاتي لبعض المحركات في مثل هذه الظروف أمر غير مقبول أو مستحيل (على سبيل المثال، المحركات الدوارة ذات التشغيل المتغير والمحركات معالدوار قفص السنجاب مع البداية معاستخدام المفاعلات والمحولات الذاتية غير المجهزة بمعدات أوتوماتيكية خاصة لبدء التشغيل التلقائي). لذلك، ينصح باستخدام إمكانية التشغيل الذاتي فقط لمحركات آليات الإنتاج الأكثر أهمية، وتزويد جميع المحركات الأخرى بحماية التتابع لفصلها عن الشبكة في حالة حدوث انخفاض عميق في الجهد. يستخدم التشغيل الذاتي للمحركات غير المتزامنة على نطاق واسع في اتحاد الجمهوريات الاشتراكية السوفياتية للمحركات في آليات محطات توليد الطاقة.
§ 28-2. تنظيم سرعة دوران المحركات غير المتزامنة باستخدام دوار القفص السنجابي
أحكام عامة.
سرعة الدوار للمحرك غير المتزامن
يمكن تقسيم طرق تنظيم سرعة دوران المحركات غير المتزامنة حسب التعبير (28-3) إلى فئتين: 1) تنظيم سرعة دوران المجال المغناطيسي الأولي
والذي يتحقق إما عن طريق تنظيم التردد الأساسي fltأو عن طريق تغيير عدد أزواج القطب p للمحرك؛ 2) التحكم في انزلاق المحرك قفي ص س -ثابت. في الحالة الأولى، تظل كفاءة المحرك عالية^ وفي الحالة الثانية، تنخفض الكفاءة كلما زادت قوة الانزلاق، لأنه في هذه الحالة تكون قوة الانزلاق (انظر الفقرة 24-5)
يتم فقده في الدائرة الثانوية للمحرك (يتم استخدام قوة الانزلاق بشكل مفيد فقط Vالمنشآت المتتالية - انظر الفقرة 28-3).
دعونا نلقي نظرة على أهمها هنا طرق التحكم في السرعةتناوب.
التحكم في السرعة عن طريق تغيير التردد الأساسي(تنظيم التردد) يتطلب استخدام مصادر الطاقة معها تردد قابل للتعديل(مولدات متزامنة معمتغيرة السرعة، محولات التردد الأيونية أو أشباه الموصلات، وما إلى ذلك) - لذلك، يتم استخدام طريقة التحكم هذه بشكل أساسي في الحالات التي يكون من الضروري فيها زيادة مجموعات المحركات بأكملها (ص> 3000 دورة في الدقيقة)سرعات الدوران (على سبيل المثال، أدوات تشغيل المعادن المحمولة باليد، وبعض الآليات في صناعة النجارة، وما إلى ذلك) أو تنظيمها في وقت واحد وبسلاسة (على سبيل المثال، محركات الطاولة الدوارة لمطاحن الدرفلة القوية، وما إلى ذلك). مع تطور محولات أشباه الموصلات، أصبح التحكم في التردد الفردي لسرعة دوران المحركات واعدًا أكثر فأكثر. يمكن الحصول على دائرة لمحرك غير متزامن على شكل قفص السنجاب مع التحكم في التردد باستخدام محولات أشباه الموصلات إذا كان في الرسم البياني في الشكل. 11-14 استبدل الجزء الدوار ذو القطب البارز بجزء دوار ذو ملف قفص سنجابي وقم بتشغيل هذه الدائرة من الشبكة تكييفمن خلال مقوم أشباه الموصلات. في هذه الحالة، يتم التحكم في العاكس بواسطة محول تردد خاص، بغض النظر عن موضع دوار المحرك. قيمة الجهد قابلة للتعديل معباستخدام المعدل.
إذا أهملنا انخفاض الجهد الصغير نسبيًا في الدائرة الأولية للمحرك غير المتزامن، إذن
تغيير كبير في قيمة التدفق F أثناء التنظيم نغير مرغوب فيه، لأن الزيادة في Ф مقابل المستوى الطبيعي تؤدي إلى زيادة في تشبع الدائرة المغناطيسية وزيادة قوية في تيار المغنطة، وانخفاض Ф يؤدي إلى قلة استخدام الماكينة، وانخفاض في سعة التحميل الزائد وزيادة في الحالي / 2 بنفس القيمة م[(انظر المساواة (25-11)]، وما إلى ذلك. لذلك، في معظم الحالات، يُنصح بالحفاظ على Ф = = const. علاوة على ذلك، من العلاقة (28-6) يترتب على ذلك أنه في نفس الوقت مع تنظيم التردد، من الضروري أيضًا لتغيير الجهد بما يتناسب معه أي الدعم
يُنصح بالانحراف عن هذه القاعدة فقط في الحالات التي يتناقص فيها M st بسرعة مع التناقص ن(على سبيل المثال محركات المروحة عندما م"= ص2).في هذه الحالة، انخفاض أسرع تجربة المستخدممقارنة بـ / L يؤدي إلى انخفاض في F ويحسن أداء الطاقة للمحرك (cos f x والكفاءة - انظر الفقرة 29-7)
وفي نفس الوقت يتناقص م رمن وجهة نظر قدرة التحميل الزائد فإنه ليس خطيرا.
مع مجموعة واسعة من التنظيم، فمن الأصح الحفاظ عليها
O = 1 جنيه استرليني /f 1 = ثابت.
تشمل عيوب تنظيم التردد الضخامة والتكلفة العالية لتركيب مصدر الطاقة.
التحكم في السرعة عن طريق تغيير عدد أزواج الأقطاب صيستخدم عادة للمحركات ذات الدوار القفصي السنجابي، لأن هذا يتطلب التغيير صفقط من أجل لف الجزء الثابت. يتغير صيمكن القيام بذلك بطريقتين: 1) باستخدام عدة لفات على الجزء الثابت، والتي يتم وضعها في فتحات مشتركة ولها أعداد مختلفة من أزواج القطب p؛ 2) استخدام نوع خاص من اللف يسمح لك بالحصول على قيم مختلفة صعن طريق تغيير (تبديل) مخطط الاتصال المتعرج. تم اقتراح عدد كبير من دوائر اللف المختلفة مع تبديل عدد أزواج الأقطاب، لكن القليل منها فقط أصبح منتشرًا على نطاق واسع. إن استخدام العديد من اللفات غير مربح، لأنه نظرا للمساحة المحدودة في الفتحات، يجب تقليل المقطع العرضي للموصلات لكل لف، مما يؤدي إلى انخفاض في قوة المحرك. إن استخدام اللفات مع تبديل عدد أزواج الأقطاب يزيد من تعقيد معدات التبديل، خاصة إذا كانوا يريدون الحصول على أكثر من سرعتي دوران باستخدام ملف واحد. كما يتدهور أداء الطاقة للمحركات إلى حد ما.
تسمى المحركات ذات عدد أزواج الأقطاب المتغيرة متعددة السرعات، وعادة ما يتم إنتاجها بسرعات دوران 2 أو 3 أو 4، ويتم تصنيع المحركات ذات السرعتين بملف واحد على الجزء الثابت ومع تبديل عدد أزواج الأقطاب فيما يتعلق. إلى ص 2: ص= 2: 1، محركات ثلاثية السرعات - مع ملفين على الجزء الثابت، أحدهما مصنوع بالتبديل Pr: Pi = 2: 1، محركات رباعية السرعات - مع ملفين على الجزء الثابت، كل منهما مصنوع من تبديل عدد أزواج القطب بنسبة 2: 1. على سبيل المثال، المحرك عند /x = 50 هرتزمع سرعات دوران متزامنة 1500/1000/750/500 دورة في الدقيقةلديه لف واحد مع التحول إلى 2 ص= 4 و 8 ولف آخر مع التبديل إلى 2p = 6 و 12.
تُستخدم المحركات متعددة السرعات في آلات قطع المعادن والنجارة، وفي مصاعد الشحن والركاب، وفي تشغيل المراوح والمضخات، وفي عدد من الحالات الأخرى.
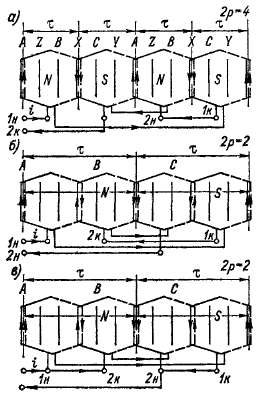
تتكون كل مرحلة من مراحل اللف مع تبديل عدد أزواج الأقطاب بنسبة 2: 1 (الشكل 28-5) من جزأين أو نصفين بنفس عدد مجموعات الملفات في كل جزء.
عندما يتم تمرير كلا جزأين الملف بواسطة تيارات في نفس الاتجاه، فإن الملف يخلق مجالًا مغناطيسيًا يحتوي على عدد كبير من الأقطاب (الشكل 28-5، أ، 2ع = 4) وعندما يتغير اتجاه التيار في أحد أجزاء الملف رقم متبادليتم خفض القطبين إلى النصف (الشكل 28-5، ب، ج، 1 ص= 2). يتم إجراء مثل هذه التبديلات في جميع المراحل في وقت واحد، ويمكن للأجزاء المبدلة من اللف
متصلة على التوالي (الشكل 28-5، أ و ب) أو على التوازي (الشكل 28-5، الخامس).
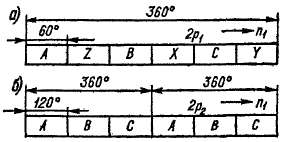
إن عرض منطقة الطور التي تشغلها جوانب ملفات مجموعة الملفات ودرجة اللف في أقسام الأسنان هي نفسها بالنسبة لكلا عدد الأعمدة. ومع ذلك، نظرًا لأنه عند تبديل عدد أزواج الأقطاب بنسبة 2: 1، يتغير تقسيم القطب بعامل اثنين، كما تتغير قيمة منطقة الطور بالدرجات الكهربائية والخطوة النسبية للملف بعامل من اثنين.
تم تصميم اللف القابل للتحويل بطريقة تحتوي على عدد أقل من أزواج الأقطاب (ع ^منطقة الطور أ = 60° el. ثم بمضاعفة عدد أزواج الأقطاب (ع2= 2 بكسل)سيكون عرض هذه المنطقة = 120° el. يجب أن تكون التناوبات الطبيعية لمناطق الطور بنفس اتجاه دوران المجال المغناطيسي لكلا سرعتي الدوران
مثل ما هو مبين في الشكل. 28-6. ويوضح الشكل ذلك، بالإضافة إلى تغيير اتجاهات التيارات في المناطق س، ص، ز(الشكل 28-6، أ) إلى الخلف (أي تحويلها إلى مناطق أ، ب، ج)،للحفاظ على اتجاه دوران المجال، وبالتالي الدوار، عند تبديل عدد أزواج القطب (الشكل 28-6، ب)، من الضروري أيضًا تبديل طرفي مرحلتين من اللف (على سبيل المثال، مرحلة فيو ج).
يتم إجراء اللف بطريقة تكون درجة ميلها مساوية للخطوة الكاملة (180° el.) مع عدد أكبر من الأعمدة (2p 2)، منذ المنحنى n. مع. اللفات ذات المنطقة a = 120° هي الأقرب إلى الجيبية عند أقصى درجة. ثم، مع عدد أقل من الأعمدة، الخطوة النسبية |J = 0.5.
أرز. 28-5. الرسوم التخطيطية
مرحلة واحدة متعرجا مع التبديل
عدد الأعمدة: أ- في 2ر = 4;
ب، ج- في 2ر = 2
مما سبق، يترتب على ذلك أن الملف مع تبديل عدد الأقطاب يخلق جهدًا بقيمة أعلى لتوافقيات المجال أعلى من الملف العادي ثلاثي الطور بزاوية a = 60° وp = 5 / v. وهذا يؤدي إلى تدهور طفيف في أداء الطاقة للمحركات مع تبديل عدد الأقطاب مقارنة بالأقطاب العادية.
في الشكل. 28-7 و28-8 يوضحان دوائر اللف الأكثر استخدامًا مع تبديل عدد أزواج الأقطاب فيما يتعلق ص 2■" pi = 2: 1. دعونا نحدد القوى وعزم الدوران التي طورتها المحركات ذات أنماط اللف هذه عند خط جهد ثابت ش نوأعلى تيار مسموح (مصنف) في نصف الطور للملف / f. مع إهمال الفرق في ظروف التبريد عند تغيير سرعة الدوران، يمكننا أن نفترض أن قيمة /f هي نفسها في كلتا سرعتي الدوران. تقريبًا
أرز. 28-6. تناوب مناطق الطور لللف مع تبديل القطب بنسبة 1: 2
أرز. 28-7. رسم تخطيطيتوصيلات متعرجة مع تبديل عدد الأعمدة بنسبة 2: 1 عند عزم دوران ثابت
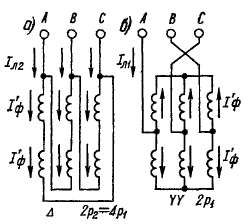
أرز. 28-8. رسم تخطيطي لوصلات اللف مع تبديل عدد الأعمدة بنسبة 2: 1 بقوة ثابتة
يمكننا أن نفترض أن عوامل القدرة والكفاءة عند نفس قيم /f لكلا سرعتي الدوران هي نفسها أيضًا. في ظل الظروف المحددة لقوة العمود للدوائر في الشكل. 28-7، أو بمتساوية على التوالي:
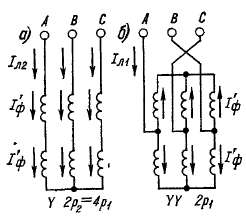
هكذا،
وبالتالي، عند الانتقال من سرعة دوران أقل (الشكل 28-7، أ)إلى واحدة أكبر (الشكل 28-7، ب)يتم مضاعفة القوة المسموح بها على العمود. في هذه الحالة، من الواضح أن عزم الدوران يظل ثابتًا، وبالتالي دائرة التبديل ص/س(الشكل 28-7) تسمى أيضًا دائرة التبديل، مع م= ثابت. مع المخططات في الشكل. 28-8، أ و بلدينا وفقا لذلك:
عادة، عند استخدام الرسم البياني في الشكل. 28-8 لكلا سرعتي الدوران تتم الإشارة إلى نفس القدرة المقدرة، أي*>
من المفترض أن Pi = L% وتسمى أيضًا دائرة التبديل D/Kk (الشكل 28-8)؛ دائرة التبديل مع ف *4 -ثابت.
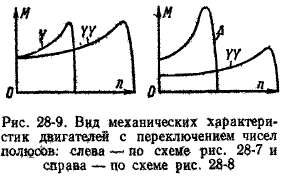
نوع الخصائص الميكانيكية * المحركات الثلاثية cq cxe| اللفات مامي الشكل. تظهر 28-7 و28^1 في الشكل. 28-9.
عند التبديل يوشوشتش,عالية السرعة، اللفات المغنيسيوم *؟
تحريض أقل في الأقسام الفردية للدائرة المغناطيسية بشكل عام*| تغيير الحالة، والذي يجب أخذه في الاعتبار عند تصميم المحرك من أجل تحقيق أقصى استفادة ممكنة من مواد المحرك من ناحية، ومن ناحية أخرى لمنع التشبع المفرط للدائرة المغناطيسية.
إن وزن وتكلفة العديد من المحركات ذات الدائرة القصيرة أكبر إلى حد ما من المحركات الحثية العادية التي لها نفس القدرة، ومع ذلك، فإن هذه هي الحاشية الأفضل والأكثر استخدامًا للتحكم في سرعة المحركات ذات القفص السنجابي.
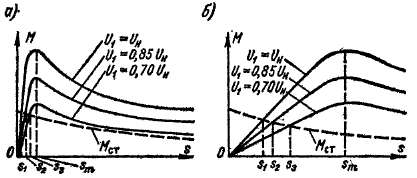
تنظيم السرعة عن طريق خفض قيمة الجهد الأساسي. عند التناقص تجربة المستخدمعزم دوران المحرك ^ ثعبان متناسب SCHوفقا لذلك، يتم تغيير الخصائص الميكانيكية (الشكل 28-10)، ونتيجة لذلك تتغير قيم زلة العمل أيضا ش ش، ق 3...لهذا النوع من الاعتماد L1″ = / (ق). من الواضح أن اللوائح في هذه الحالة موجودة في "؟" ممكن في 0< s < ن.م.للحصول على حجم كبير بما فيه الكفاية
نطاق التحكم في السرعة من الضروري أن تكون المقاومة النشطة للدائرة الدوارة، وبالتالي، ق مكانت كبيرة جدًا (الشكل 28-10، ب).
أرز. 28-10. الخصائص الميكانيكية للمحركات غير المتزامنة عند قيم مختلفة للجهد الأساسي
يجب أن يؤخذ في الاعتبار أن الخسائر تحدث في الدائرة الثانوية مساوية لقوة الانزلاق صوالتسبب في زيادة تسخين الدوار.
تُستخدم هذه الطريقة للتحكم في السرعة أيضًا للمحركات ذات الدوار الملفوف، وفي هذه الحالة يتم تضمين مقاومات إضافية في الدوار.
بسبب انخفاض الكفاءة والصعوبات في تنظيم الجهد، يتم استخدام الطريقة قيد النظر فقط للمحركات منخفضة الطاقة. وفي نفس الوقت للتنظيم Utيمكنك استخدام محولات ذاتية قابلة للتعديل أو مقاومات متصلة على التوالي بالمفتاح الأساسي V السنوات الأخيرةلهذا الغرض، يتم استخدام مفاعلات التشبع، التي تنظمها مغنطة إضافية مع التيار المباشر (انظر الفقرة 18-4)، بشكل متزايد (الشكل 28-11). عند تغيير القيمة العاصمةالمغنطة، تتغير المفاعلة الحثية للمفاعل
يؤدي إلى تغيير في الجهد عند أطراف المحرك. بواسطة التنظيم التلقائيالتيار المتحيز، يمكنك توسيع منطقة التحكم في السرعة إلى المنطقة > ق موفي نفس الوقت الحصول على خصائص ميكانيكية صلبة.
أرز. 28-11. مخطط لتنظيم محرك غير متزامن باستخدام مفاعل ذو مغنطة 1 DC
أرز. 28-12. مخطط التحكم في النبض لسرعة دوران محرك غير متزامن
التحكم في سرعة النبض(الشكل 28-12) يتم ذلك عن طريق توصيل المحرك بالشبكة بشكل دوري وفصله عن الشبكة أو عن طريق تجاوزه بشكل دوري باستخدام موصل لمقاومات متصلة على التوالي بالدائرة الثابتة أو صمامات أشباه الموصلات. في هذه الحالة، يكون المحرك بشكل مستمر في وضع عابر من التسارع أو التباطؤ في سرعة دوران الدوار، واعتمادًا على تردد ومدة النبضات، يعمل بسرعة دوران معينة وثابتة تقريبًا. يتم استخدام التحكم في السرعة هذا فقط للمحركات ذات الطاقة المنخفضة جدًا (Р n< 30 -т- 50 ت / ع).
تمت مناقشة بعض المشكلات المتعلقة بتنظيم سرعة دوران المحركات غير المتزامنة بمزيد من التفصيل في دورات القيادة الكهربائية.
§ 28-3. تنظيم سرعة دوران المحركات غير المتزامنة مع دوار الجرح
بالنسبة للمحركات ذات الدوار الملفوف، من الممكن، من حيث المبدأ، استخدام نفس الطرق لتنظيم سرعة الدوران كما هو الحال بالنسبة للمحركات ذات الدوار ذو القفص السنجابي (انظر الفقرة 28-2). ومع ذلك، من الناحية العملية، من بين هذه الطرق، يتم استخدام طريقة تنظيم سرعة الدوران باستخدام مفاعلات التشبع فقط للمحركات ذات الدوار المجروح. أدناه سننظر في طرق تنظيم سرعة الدوران الخاصة بالمحركات ذات الدوار الملفوف والتي تستخدم إمكانية تضمين أجهزة التحكم في الدائرة الثانوية.
تنظيم سرعة الدوران باستخدام الريوستات الموجود في الدائرةالدوارأنتجت وفقا لنفس المخطط الشكل. 28-3 بالنسبة لبدء تشغيل المحرك المتغير، ولكن يجب أن يكون المتغير مصممًا للتشغيل على المدى الطويل. مع زيادة المقاومة النشطة للدائرة الثانوية، يتغير نوع الخاصية الميكانيكية للمحرك (انظر الشكل 28-4، أ): تصبح الخاصية أكثر ليونة ويزداد انزلاق المحرك عند نفس عزم الحمل M st.
في م"=؟ تتناسب قسيمة العمل الثابتة مع الدقة العالية ق موبالتالي المقاومة النشطة للدائرة الدوارة. حتى تنزلق قو"المطابق للحالات ز د = 0 و د =و= 0، في النسبة
ترتبط الطريقة المدروسة للتحكم في السرعة بفقدان كبير للطاقة في المقاومة وبالتالي فهي غير اقتصادية. يتم استخدامه بشكل أساسي للتشغيل قصير المدى أو المتقطع (على سبيل المثال، أوضاع التشغيل لبعض الآلات، وأجهزة الرافعة، وما إلى ذلك)، وكذلك في محركات الأقراص ذات عزم دوران المروحة. في الحالة الأخيرة، تتناقص الطاقة الموجودة على العمود بسرعة مع انخفاض السرعة، وبالتالي تكون قوة الانزلاق والخسائر في دائرة الدوار محدودة الحجم.
تشمل عيوب التحكم في السرعة المتغيرة أيضًا النعومة الخصائص الميكانيكيةواعتماد نطاق التحكم على قيمة التحميل. على وجه الخصوص، التحكم في السرعة في وضع الخمول يكاد يكون مستحيلاً.
تنظيم سرعة الدوران عن طريق إدخال ه إضافية. د.س. إلى الدائرة الثانوية للمحرك.
إن تنظيم سرعة دوران المحرك غير المتزامن عن طريق زيادة انزلاقه يرتبط دائمًا بإطلاق كمية كبيرة من الطاقة في الدائرة الثانوية للمحرك. الطاقة الكهربائيةينزلق
معظمها، أثناء التنظيم المتغير، يُفقد في المتغير المتغير. لذلك، بطبيعة الحال، تنشأ فكرة حول الاستخدام المفيد لهذه القوة وبالتالي زيادة كفاءة التثبيت.
من الممكن الاستخدام المفيد لقدرة الانزلاق إذا تم توصيل جهاز الاستقبال بحلقات الانزلاق لمحرك الطور بدلاً من المتغير الطاقة الكهربائيةعلى شكل آلة كهربائية مساعدة مناسبة لهذا الغرض.
ستعمل هذه الآلة في وضع المحرك وتؤثر على المحرك غير المتزامن المنظم، مما يؤدي إلى تطوير جهد عند أطرافه الثانوية، لأنه عندما تدور الآلة المساعدة، يتم تحفيز e في عضو الإنتاج الخاص بها. د.س. يمكننا أيضًا أن نقول أن مهمة الآلة المساعدة، مثل المتغير المتغير في التنظيم المتغير، هي إنشاء "دعم" للجهد على حلقات الانزلاق لمحرك غير متزامن قابل للتعديل، نظرًا لوجود جهد معين على الحلقات يو 2 ك- شرط لا غنى عنه للإصدار معهذه الحلقات ذات قوة معينة
ف SK = م 2 يو 2 ك أنا 2كوس و 2
إلى الدائرة الخارجية للمحرك . وفي الوقت نفسه، الجهاز المساعد
على عكس الريوستات، فإنه يسمح بالاستخدام المفيد لهذه القوة.
بادئ ذي بدء، دعونا ننظر في مسألة التأثير على تشغيل المرحلة
محرك غير متزامن للطاقة الإضافية الخارجية. د.س. دخلت £ د
إلى الدائرة الثانوية للمحرك باستخدام حلقات الانزلاق الخاصة به، بشرط أن يكون تردد هذا e الإضافي. د.س. يساوي دائمًا تردد التيار الثانوي و e. د.س. / 2 = s/i للمحرك نفسه.
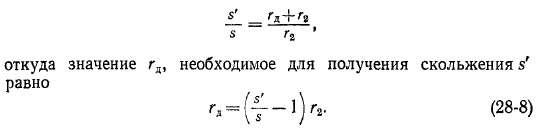
في الشكل. 28-13، أيصور مخطط متجهاتالدائرة الثانوية لمحرك غير متزامن في ه أ - 0. تيار المحرك الثانوي
لديه الحجم اللازم لإنشاء عزم الدوران الكهرومغناطيسي المطلوب موفقا لحجم لحظة التحميل م"على رمح.
الأرز، 28-13. الرسوم البيانية المتجهة للدائرة الثانوية لمحرك غير متزامن في حالة عدم وجود طاقة إضافية. د.س. (أ) وبعد تقديم هذا ه. d.s، لتقليل (ب) وزيادة (ج) سرعة الدوران
إذا كان الأمر كذلك الآن، فقد تم تقديم الدائرة الثانوية e. د.س. هعداد ه. د.س. ينزلق £«« في نفس الدائرة ثم التيار الثانوي
سوف تنخفض في اللحظة الأولى من الزمن. ولذلك، فإن عزم الدوران الذي طوره المحرك مسينخفض أيضًا، وسيبدأ المحرك في التباطؤ، وسيزداد الانزلاق. وفي هذه الحالة حسب المساواة (28-ش) التيار 1 جرام،ومعها اللحظة مسوف تزيد. سيحدث هذا حتى يتم تحقيق التوازن مرة أخرى م= M" على العمود. في هذه الحالة، سيعمل المحرك بانزلاق متزايد، وسيأخذ المخطط المتجه للدائرة الثانوية الشكل الموضح في الشكل. 28-13، ب.ومن الواضح أنه عن طريق تعديل القيمة إي أمن الممكن تنظيم قيمة s وبالتالي سرعة دوران المحرك.
لنفترض الآن أن e. د ق. £ d له اتجاه معاكس مقارنة بالحالة المدروسة ويتزامن
في اللحظة الأولى بعد إدخال e، d.s. إي أناسيزداد التيار / 2 وعزم الدوران A، وسوف يتسارع المحرك وسينخفض s. مع وجود قيمة كافية £d، ستنخفض قيمة s إلى الصفر، وإذا تم إنشاء التيار / 2 في هذه الحالة فقط بسبب الإجراء حسنًا،سيظل كبيرًا مقارنة بالتيار المطلوب لإنشاء عزم الدوران م- M St فيستمر تسارع المحرك وتتجاوز السرعة السرعة المتزامنة. زلة ق وه. د.س. يوتسوفي هذه الحالة تتغير علاماتها وتزداد قيمتها المطلقة حتى ينخفض التيار طبقاً للتعبير (28-11) إلى
الحجم المطلوب. عندما س< О угол чр 2 = aretjg отрицали тельный й векторная диаграмма вторичной цепи двигателя имеет
العرض الموضح في الشكل. 28-13، V.حاضِر \ % في هذه الحالة، سيكون لها مكون يتطابق مع F. لذلك، فإن تيار المغنطة المستهلك من الدائرة الأولية سوف ينخفض و cos
وهكذا، بمساعدة إضافية ه. د.س. £ d، من خلال تغيير حجمه واتجاهه، من الممكن تنفيذ تحكم سلس في منطقتين لسرعة المحرك: أقل وأعلى من المتزامن.
إذا أهملنا الخسائر، فإن قوة مصدر الكهرباء الإضافية. د.س. يساوي قوة الانزلاق س معلاوة على ذلك، بالنسبة إلى s > 0، يكون هذا المصدر بمثابة جهاز استقبال ويستهلك الطاقة من الدائرة الثانوية للمحرك، وبالنسبة إلى s< 0 - генератором и отдает мощность во вторичную цепь двигателя. Механическая мощность, развиваемая المجال المغنطيسيمحرك،
لـ s > 0 سيكون أقل ر ش،وبالنسبة s< 0 в соответствии с изменением знака мощности скольжения ص ث > ص ey.
سلسلة من المحركات غير المتزامنة مع آلة DC.
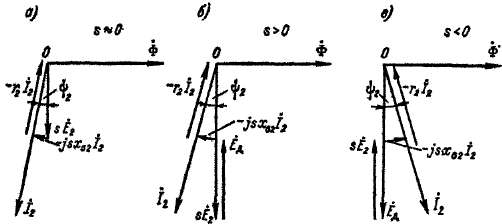
تنفيذ الطريقة المدروسة لتنظيم سرعة دوران محرك غير متزامن باستخدام طاقة إضافية. د.س. يتم تنفيذها في توصيلات متتالية للمحرك مع الآلات الكهربائية المساعدة. دعونا نفكر هنا في التوصيلات المتتالية للمحرك غير المتزامن مع جهاز التيار المستمر. في الشكل. 28-14، أيُظهر رسمًا تخطيطيًا لسلسلة محرك غير متزامن الطور جحيم،قيادة بعض آلة العمل آر إم،مع آلة DC الإثارة المستقلة

MPT.سلسلة حديد التسليح MPTمتصل بحلقات الانزلاق لمحرك غير متزامن عبر مقوم أيوني أو أشباه الموصلات في،متصلة عبر دائرة جسر ثلاثية الطور. يقوم المقوم بتحويل التيار المتردد إلى تردد الانزلاق / 2 = سادس العاشرفي الدائرة الثانوية جحيملتوجيه التيار في دائرة عضو الإنتاج MPT.القوة الدافعة الكهربائية. المراسي MPTفي هذه الحالة، هو e الإضافي الذي تمت مناقشته أعلاه. د.س. إل ل،والتي (في هذه الحالة باستخدام المعدل في)يتم إدخاله في الدائرة الثانوية للمحرك جحيم.تنظيم قيمة هذا ه. د.س. وسرعة الدوران جحيميتم إنتاجه عن طريق تنظيم تيار الإثارة MPT.
في الرسم البياني الشكل. 28-14، أماكينة العاصمة MPTتقع على عمود محرك غير متزامن جحيم.إنها تتحول
أرز. 28-14. مخططات المراحل الكهروميكانيكية (أ) والكهربائية (ب) لمحرك غير متزامن جحيممع آلة العاصمة MPT
قوة الانزلاق ملاحظة،المستهلكة من الدائرة الثانوية جحيم،إلى قوة ميكانيكية، والتي من خلال عمود المحرك جحيمجنبا إلى جنب مع الطاقة الميكانيكية P mx يتم نقل المحرك إلى آلة العمل آر إم.مثل هذا الشلال يسمى الكهروميكانيكية. إذا تم ضمان الاستخدام الكامل للطاقة عند تنظيم سرعة الدوران جحيم(P x = P n = const) وإهمال الخسائر، ثم في هذه السلسلة يتم نقل الطاقة إلى آلة العمل آر إم،
يظل أيضًا ثابتًا في جميع السرعات ويساوي القوة المقدرة. في هذا الصدد، يُطلق على الشلال الكهروميكانيكي أحيانًا اسم شلال الطاقة الثابت. القدرة المقدرة المطلوبة للآلة المساعدة المتتالية (في هذه الحالة مبت)يعتمد على حدود التحكم في السرعة:
تسمح السلسلة المتتالية ذات المقومات بالتحكم في السرعة فقط للأسفل من المتزامن (s > 0). إذا قمت باستبدال المقوم بمحول أيوني أو أشباه الموصلات يمكن التحكم فيه، وقادر أيضًا على إجراء تحويل عكسي - التيار المباشر إلى تيار متردد، فيمكنك أيضًا تنظيم السرعة لأعلى من المتزامن (s)< 0). Указанные на рис. 28-14 направления передачи мощности скольжения при ق< 0 изменятся на обратные. Ввиду сложности системы управления таким преобразователем и других причин эти каскады до сих пор применения не получили. Ранее применялись также каскады, выполненные по схеме рис. 28-14, أ،حيث تم استخدام محول AC-DC أحادي المحرك بدلاً من المقوم (انظر الفقرة 41-1).
في الشكل. 28-14، بيظهر الرسم البياني التتالي، والذي يختلف عن الرسم البياني في الشكل. 28-14، ألأن MPTمتصلة ميكانيكياً بجهاز مساعد غير متزامن أو متزامن جهاز افتراضي.في هذا تتالي قوة انزلاق ص"لـ s > 0 يتم إرساله باستخدام جهاز افتراضي،التشغيل في وضع المولد، والعودة إلى مصدر التيار المتردد. في ق< 0 جهاز افتراضييعمل في وضع المحرك. مثل هذا الشلال يسمى الكهربائية. في هذه الآلة المتتالية آر إميتم نقل القوة الميكانيكية للمحرك فقط جحيم
الذي في ف\ - ن -يتناقص const بما يتناسب مع سرعة الدوران. لحظة رمح آر إمفي الوقت نفسه يظل ثابتًا، ونتيجة لذلك يُطلق على مثل هذا الشلال أحيانًا اسم الشلال ذو اللحظة الثابتة. سيارات جهاز افتراضيو MPTفي الرسم البياني الشكل. 28-14، بيمكن استبداله بمحول ومحول أشباه الموصلات من DC إلى AC والعكس.
تسمح الشلالات بالتنظيم الاقتصادي والسلس لسرعة دوران المحرك غير المتزامن، لكن الآلات والمحولات المساعدة تزيد من تكلفة التركيب. لذلك، يُنصح باستخدام الشلالات فقط لتشغيل آليات الإنتاج القوية التي تتطلب التحكم في السرعة ضمن حدود واسعة إلى حد ما (على سبيل المثال، مصانع الدرفلة، مراوح قوية جدًا، وما إلى ذلك). تسمى الوصلات المتتالية التي تمت مناقشتها أعلاه أيضًا بشلالات الصمامات نظرًا لاستخدام الصمامات الأيونية أو أشباه الموصلات فيها.
هناك أيضًا أنظمة تعاقبية أخرى، على وجه الخصوص باستخدام آلات مبدل التيار المتردد (انظر الفقرة 42-3). يتم تنفيذ التركيبات المتتالية بقوة مئات وآلاف الكيلووات مع التحكم في سرعة الدوران بما يصل إلى 3: 1 أو أكثر.