كيفية تنظيم سرعة المحرك غير المتزامن. التحكم في سرعة المحرك غير المتزامن
في كثير من الحالات، يتم استخدام المحركات غير المتزامنة ثلاثية الطور لمحركات الأقراص التي لا تتطلب التحكم في السرعة. لكن المحركات غير المتزامنة لها مزايا قيمة: الموثوقية، والتكلفة المنخفضة، وبساطة التصميم، كفاءة عاليةووزن منخفض نسبيا. ولهذه الأسباب، هناك رغبة طبيعية في استخدامها لمحركات الأقراص ذات السرعات المتغيرة.
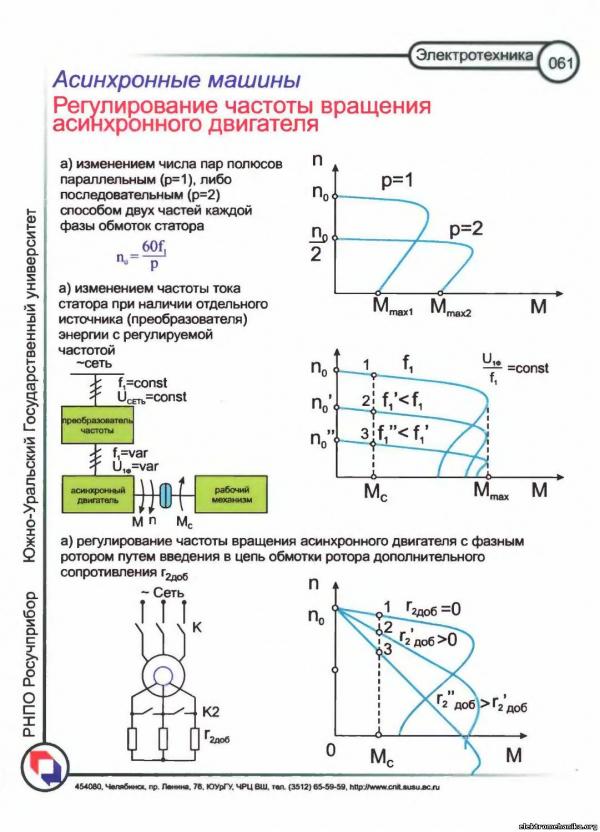
لتنظيم السرعة المحركات غير المتزامنةمع الدوار ذو القفص السنجابي، عادةً ما يتم استخدام طريقة تنظيم التردد، وهي تنظيم سلس لسرعة الدوران المجال المغنطيسيمن خلال تنظيم تردد التيار في ملفات الجزء الثابت، وطريقة لتغيير عدد أزواج أقطاب المجال المغناطيسي الدوار، حيث يتغير تردد دوران المجال المغناطيسي بشكل مفاجئ.
لتنظيم سرعة دوران المحركات غير المتزامنة باستخدام دوار الجرح، يتم استخدام طريقة التحكم المتغيرة، وهي تحكم سلس في انزلاق الدوار عن طريق تغيير المقاومة النشطة لملفات الطور الخاصة به.
تنظيم التردد. الطريقة الواعدة للتحكم في سرعة دوران المحرك غير المتزامن هي تنظيم تردد التيار المتردد الثابتمحرك. السرعة الزاوية للمجال الدوار n = 2 f/r. وبالتالي، عندما يتغير التردد الحالي f، تتغير السرعة الزاوية للمجال بشكل متناسب. ومع ذلك، عند تنظيم التردد الحالي، يجب أن يؤخذ في الاعتبار أن تنظيم الجهد المتزامن ضروري. ويرجع ذلك إلى حقيقة أنه وفقًا للتعبير (14.10)، فإن الطور EMF، وبالتالي جهد الإمداد، يتناسب مع التردد والتدفق الحالي. نظرًا لأن التدفق يجب أن يظل كما هو في جميع الأوضاع، يجب أن يكون الجهد (دون مراعاة انخفاض الجهد في الجهاز) متناسبًا مع التردد. بالإضافة إلى ذلك، يعد ذلك ضروريا بحيث عندما تتغير سرعة المحرك، لا يتغير عزم الدوران.
لتقدير طبيعة اعتماد عزم الدوران على تردد التيار في ملفات الجزء الثابت وعلى الجهد عليه، نهمل المقاومة النشطة لملف الجزء الثابت في المعادلة (14.28) ز لومقاومات التسرب الحثية لملفات الجزء الثابت x pac 1 ولفات العضو الدوار x pac2 واستخدم التعبير الخاص بتردد الانزلاق (14.13):
مفر= = أ،
أين أ= ثابت.
وبالتالي، عندما يتغير تردد التيار، من أجل الحفاظ على عزم الدوران ثابت، من الضروري تغيير الجهد على الجزء الثابت بشكل متناسب؛ وبعبارة أخرى، فإن شرط الحفاظ على عزم دوران ثابت للمحرك عند تنظيم التردد سيكون ش 1/و= ثابت. إذا قمت بتنظيم تردد التيار والجهد، ومراقبة الحالة المحددة، إذن الخصائص الميكانيكيةسيظل المحرك جامدًا، ويكون الحد الأقصى لعزم الدوران مستقلاً تقريبًا عن التردد (ينخفض بشكل ملحوظ فقط مع انخفاض نسبي). ترددات منخفضة). وفي الوقت نفسه، سوف تتغير الطاقة بما يتناسب مع تردد التيار، منذ ذلك الحين ف2 =م فر. على سبيل المثال، عندما ينخفض التردد الحالي إلى النصف، تنخفض قوة المحرك على العمود إلى النصف.
التنظيم عن طريق تغيير عدد أزواج القطب. من الممكن التغيير التدريجي في السرعة الزاوية للمحرك غير المتزامن على نطاق واسع على حساب جعل تصميم المحرك غير المتزامن أكثر تعقيدًا وأكثر تكلفة - ويتم التنظيم عن طريق تبديل عدد أزواج أعمدة المحرك.
عند تردد شبكة ثابت، تعتمد السرعة الزاوية للمجال الدوار فقط على عدد أزواج أقطاب هذا المجال، التي يحددها ملف الجزء الثابت. إذا تم وضع ملفين منفصلين على الجزء الثابت - يتم تشكيل أحدهما صالبخار والآخر يتشكل ع"أزواج من الأقطاب ، ثم من خلال توصيل الملف الأول أو الثاني بالشبكة نحصل على تردد دوران المجال:
ن 1 =60f/ص أو ع" 1 = 60f/ص"،لذلك،
ن1/ ع" 1 = ع"/ ع،
ستختلف سرعة دوار المحرك وفقًا لذلك. في هذه الحالة، ينبغي أن يتم لف الدوار المحرك مثل عجلة السنجاب.
لا ترتبط أعداد أقطاب اللفات الثابتة في هذه الحالة بأي شكل من الأشكال ويمكن اختيارها بأي شكل من الأشكال حسب ظروف تشغيل المحرك. يعود التنظيم نفسه إلى التغيير المفاجئ في سرعة دوران مجال المحرك. لكن سرعة الدوار لا يمكن أن تتغير فجأة بسبب القصور الذاتي لنظام القيادة الكهربائية بأكمله. فقط بعد التبديل يبدأ التغيير المقابل في سرعة الدوار.
لإظهار عملية الانتقال هذه بشكل أكثر وضوحا، سوف نقوم ببناء خاصيتين ميكانيكيتين آلة غير متزامنةمع عدد متغير من أزواج القطب: خاصية واحدة مقابلة صأزواج من الأعمدة، والثانية ع" = 1 عأزواج من الأعمدة (على التوالي، الشكل 14.31، أو ب).لنفترض أن عزم الدوران على عمود المحرك يظل ثابتًا مع تغير تردد دوران المجال. مع زيادة في الأخير، أي عند الانتقال من ع"ل صأزواج من الأعمدة، يجد المحرك نفسه أولاً في ظروف قريبة من البداية، ويحدث تدفق تيار.
ولكن عند الانتقال من صل ع"، أي عندما ينخفض تردد دوران المجال، تجد الآلة نفسها أولاً في وضع المولد وتعمل، مما يوفر الطاقة للشبكة.
يُستخدم هذا الوضع أحيانًا للفرملة السريعة والاقتصادية للمحرك الكهربائي.
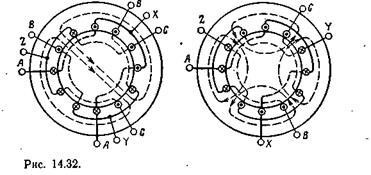
فقط المحركات منخفضة الطاقة هي التي تحتوي على أعضاء ساكنة مزودة بملفين منفصلين؛ بالنسبة للمحركات عالية الطاقة، يكون من الأفضل تبديل ملفات من نفس الملف للحصول على عدد مختلف من أزواج الأعمدة. في الشكل. يوضح الشكل 14.32 رسمًا تخطيطيًا لتبديل ملف ثلاثي الطور من قطبين إلى أربعة أقطاب. يتطلب تبديل اللف بنسبة غير 1:2 تغييرًا أكثر تعقيدًا في الدائرة ويتم استخدامه بشكل أقل تكرارًا.
في معظم الحالات، تم تجهيز الجزء الثابت للآلة غير المتزامنة بملفين مستقلين، يتم تبديل كل منهما بنسبة 1: 2 أو غير ذلك. وبالتالي فإن المحرك لديه أربع مراحل للسرعة، على سبيل المثال 3000، > 1500، 1000 و 500 دورة في الدقيقة.
تنظيم ريوستاتيكي. في المحركات غير المتزامنة ثلاثية الطور ذات الدوار المجروح، يتم استخدام طريقة مقاومة متغيرة لتنظيم سرعة الدوار. يتم تحقيق ذلك عن طريق إدخال مقاومة متغيرة ثلاثية الطور قابلة للتعديل في دائرة ملفات الطور للدوار، كما هو الحال عند بدء تشغيل المحرك (الشكل 14.24). ولكن يجب تصميم هذا المتغير للحمل طويل الأمد مع تيار الدوار، وليس للتحميل قصير المدى، مثل المتغير المتغير. تؤدي زيادة المقاومة النشطة للدائرة الدوارة إلى تغيير الخاصية م(ق) - يجعلها أكثر ليونة (انظر الشكل 14.25). إذا، عند عزم دوران ثابت على عمود المحرك، تزداد المقاومة النشطة لدائرة الدوار عن طريق زيادة مقاومة المقاومة المتغيرة تدريجيًا (r п1< rص2< r р3), то рабочая точка будет смещаться с одной кривой آنسة)إلى التالي، الموافق للمقاومة المتزايدة للدائرة الدوارة (الشكل 14.25، النقاط 1-4), وبناءً على ذلك، سيزداد الانزلاق، وبالتالي ستنخفض سرعة المحرك.
بهذه الطريقة من الممكن تغيير سرعة الدوار في النطاق من التوقف الاسمي إلى التوقف الكامل. ولكن مع طريقة التنظيم هذه، فإن خسائر الطاقة الكبيرة نسبيًا أمر لا مفر منه (انظر الفقرة 14.11). قوة المجال الدوارة ص فر، صدون الأخذ في الاعتبار فقدان الطاقة في قلب الجزء الثابت، فهو يتكون (انظر الشكل 14.20) من فقدان الطاقة في موصلات الملف الدوار (انظر الدائرة المكافئة في الشكل 14.19)؛
R pr2 =r" in2 (I" 2) 2
والقوة الميكانيكية
R الفراء = ص" in2 (أنا" 2) 2.
سلوك
ص ص 2 / ص الفراء = ق/(ل -ق) = (ن 1 - ع)/ص
يوضح أن تقسيم الطاقة الميكانيكية يتناقص بشكل مباشر مع انخفاض سرعة الدوار، بينما في نفس الوقت تزداد حصة فقدان الطاقة في المقاومة النشطة لدائرة الدوار وفقًا لذلك. وبالتالي، لتقليل سرعة المحرك، على سبيل المثال، بنسبة 25٪، من الضروري تضمين مقاومة متغيرة في دائرة الدوار مع هذه المقاومة النشطة التي سيتم تحويل ربع طاقة المجال المغناطيسي الدوار إلى حرارة بلا فائدة. قد يكون عيب هذا التنظيم هو حقيقة أن إدراج المتغير المتغير في دائرة الدوار يجعل الخصائص الميكانيكية للمحرك أكثر ليونة، وبالتالي يقلل من استقرار سرعة دورانه. عند تشغيل الريوستات، تؤدي التغييرات الصغيرة في حمل العمود إلى تغيرات كبيرة في سرعة المحرك.
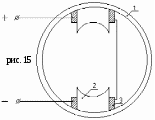
مبدأ تشغيل DPT.يجب أن تتكون الآلة من جزأين رئيسيين: الجزء الأول يولد تدفقًا مغناطيسيًا، والجزء الثاني يتم فيه حث القوة الدافعة الكهربية. الجزء الأول في السيارة العاصمةبلا حراك. يتم ربط الأعمدة المختومة (2) بالإطار (1) الذي يوجد عليه ملف الإثارة (3). الجزء الثاني هو المرساة. المرساة تدور. وهي عبارة عن أسطوانة مصنوعة من صفائح من الفولاذ الكهربائي (4) يوجد في الجزء الخارجي من عضو الإنتاج أخاديد حيث يتم وضع مقاطع اللف (5). ويرتبط كل قسم بلوحات التجميع (6). 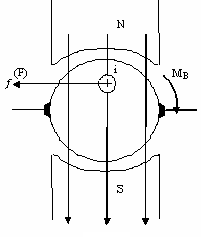
يعتمد عزم الدوران الكهرومغناطيسي على التدفق وتيار عضو الإنتاج. في وضع المولد، يتم كبح عزم الدوران الكهرومغناطيسي. سيتم كتابة معادلة حالة التوازن للحظات، حيث عزم الدوران الميكانيكي على عمود المولد، هو عزم الدوران xx، هو عزم الدوران الكهرومغناطيسي. المعادلة الأساسية لحركة محرك كهربائي. عملية الحالة المستقرة عندما،،، إذا،،. لو،،. 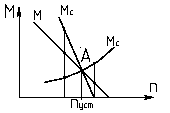
 مبدأ التحكم في السرعة.من وجهة نظر التحكم في السرعة، يعتبر محرك التيار المستمر عالميًا. يمكن ضبط السرعة عن طريق تغيير المقاومة في دائرة عضو الإنتاج، والتدفق، والجهد الموفر. ويمكن ملاحظة ذلك من الصيغة: .
مبدأ التحكم في السرعة.من وجهة نظر التحكم في السرعة، يعتبر محرك التيار المستمر عالميًا. يمكن ضبط السرعة عن طريق تغيير المقاومة في دائرة عضو الإنتاج، والتدفق، والجهد الموفر. ويمكن ملاحظة ذلك من الصيغة: .
المقاومة في دائرة المحرك.المعادلات الحالية قبل وبعد إدخال المقاومة
من أين أي تقل لحظة التيارات (). وفي الوقت نفسه، تنخفض السرعة. ومع انخفاض السرعة، يزداد تيار عضو الإنتاج وسيصل إلى تيار عضو الإنتاج الأصلي، ولكن بسرعة أقل. يتم التحكم في سرعة الدوران عن طريق المقاومة الموجودة في دائرة عضو الإنتاج في اتجاه السرعة المتناقصة. 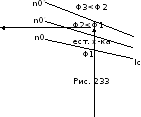
تدفق.تيار المحرك قبل وبعد تغير التدفق هو نسبتهم. معادلة 5.1. لحظات دعونا نقلل من التدفق، زاد تيار عضو الإنتاج، ثم (يزيد).
الجهد االكهربى.يتم التحكم في سرعة الدوران بالطرق التالية: أ) نظام محرك المولد (G-E). ب) محرك تحويل الثايرستور (TP-D). ب) تنظيم عرض النبض.
 أ) نظام G-D، الشكل 234. . من خلال زيادة تيار الإثارة للمولد i vg، يزداد التدفق F g و E g، وبالتالي يزداد الجهد عند عضو المحرك وتزداد السرعة.
أ) نظام G-D، الشكل 234. . من خلال زيادة تيار الإثارة للمولد i vg، يزداد التدفق F g و E g، وبالتالي يزداد الجهد عند عضو المحرك وتزداد السرعة.
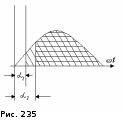
ب) محرك تحويل الثايرستور. من خلال زيادة زاوية التحكم، تقل مساحة نصف الدورة، وينخفض متوسط قيمة الجهد -U av، وبالتالي تنخفض سرعة الدوران.
ب) تنظيم عرض النبض.
عن طريق تغيير وقت النبض t، تتغير دورة العمل، حيث t و هو وقت النبض؛ ر ص - وقت التوقف. متوسط القيمة U av =U 0 . . 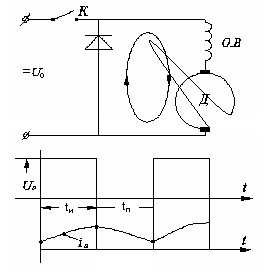
6. طرق تنظيم القوة النشطة والمتفاعلة للآلة المتزامنة.
طرق تنظيم الطاقة النشطة والمتفاعلة للمولد المتزامن.كما رأينا للتو، إذا قمنا بتغيير إثارة المولد، فإننا بذلك نغير القدرة التفاعلية، إما التوصيل أو الاستهلاك. لا يمكن تعديل الطاقة النشطة إلا عن طريق تغيير الطاقة الميكانيكية من التوربين البخاري أو التوربين الهيدروليكي. مع زيادة الطاقة النشطة الناتجة، من الضروري زيادة الطاقة الميكانيكية على جانب التوربين.
ابدأ SD.لبدء تشغيل محرك متزامن، من الضروري تسريع الجزء المتحرك باستخدام عزم دوران خارجي إلى سرعة دوران قريبة من السرعة المتزامنة. نظرًا لنقص عزم الدوران في المحرك المتزامن، يتم استخدام الطرق التالية لبدء تشغيله: 1 البدء باستخدام محرك مساعد؛ 2-بدء تشغيل المحرك غير المتزامن.
1. لا يمكن تشغيل محرك متزامن بمساعدة محرك مساعد إلا بدون تحميل ميكانيكي على عموده، أي. فارغة تقريبا. في هذه الحالة، خلال فترة بدء التشغيل، يتحول المحرك مؤقتًا إلى مولد متزامن، حيث يتم تشغيل الدوار بواسطة محرك مساعد صغير يصل إلى n=0.95n 1 . يتم توصيل الجزء الثابت لهذا المولد بالتوازي مع الشبكة وفقًا لشروط هذا الاتصال. بعد توصيل الجزء الثابت بالشبكة، مع تأخير قصير، يتم تشغيل الملف الميداني، ويتم سحب المحرك إلى التزامن، ويتم إيقاف تشغيل محرك القيادة المساعد ميكانيكيًا. طريقة البدء هذه معقدة وتحتوي أيضًا على محرك مساعد.
2. يتحول المحرك المتزامن إلى محرك غير متزامن أثناء بدء التشغيل. لتمكين تكوين عزم بدء غير متزامن، يتم وضع ملف بدء ذو دائرة قصيرة في فتحات قطع القطب لمحرك القطب البارز. تتم عملية بدء تشغيل محرك متزامن على مرحلتين. عندما يتم توصيل ملف الجزء الثابت (1) بالشبكة، يتم تشكيل مجال دوار في المحرك، والذي سوف يحفز EMF في ملف الدوار ذو الدائرة القصيرة (2). تحت تأثير أي تيار سوف يتدفق في القضبان. نتيجة لتفاعل المجال المغناطيسي الدوار مع التيار في الملف ذو الدائرة القصيرة، يتم إنشاء عزم دوران، مثل المحرك غير المتزامن. بسبب هذه اللحظة، يتسارع الجزء المتحرك إلى الانزلاق بالقرب من الصفر (S = 0.05)، الشكل 1. 313. وبهذا تنتهي المرحلة الأولى. من أجل سحب دوار المحرك إلى التزامن، من الضروري إنشاء مجال مغناطيسي فيه عن طريق تشغيل التيار المباشر في ملف الإثارة (3) (عن طريق تبديل المفتاح K إلى الموضع 1). وبما أن الجزء المتحرك يتم تسريعه إلى سرعة قريبة من التزامن، فإن السرعة النسبية للجزء الثابت ومجالات الجزء المتحرك تكون صغيرة. سوف تتداخل الأعمدة بسلاسة مع بعضها البعض. وبعد سلسلة من الانزلاقات، سوف تتجاذب الأقطاب المتقابلة وسيتم سحب الجزء المتحرك إلى حالة التزامن. وبعد ذلك سوف يدور الجزء المتحرك بسرعة متزامنة، وستكون سرعة دورانه ثابتة، كما في الشكل 1. 313. وبهذا تنتهي المرحلة الثانية من الإطلاق. تشغيل SD في الأوضاع غير المفعمة بالإثارة والمفرطة (ب=
فار).
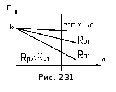
يتوافق وضع التشغيل مع عزم الدوران الثابت. في. مع محرك متزامن غير متحمس، يتوافق مكون الجهد -E 0 مع التيار I، الذي يتخلف عن الجهد Uc بزاوية φ. سوف يتأخر المكون التفاعلي للتيار I L بمقدار 90 0 عن ناقل الجهد Uc، أي. هذا التيار حثي بحت. هذا يعني أنه عندما يكون المحرك غير متحمس، سوف يستهلك تيارًا حثيًا من الشبكة، وبالتالي سيستهلك أيضًا طاقة تفاعلية من الشبكة. 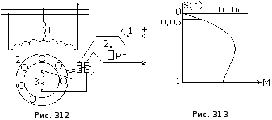
مع زيادة الإثارة، ستزداد القيمة –E 0 1، وسوف ينخفض التيار إلى Ia = I 1 وسيكون في حده الأدنى. في هذا الوضع، سيعمل SD مع cosφ=1 و قوة رد الفعل، لن يتم استهلاكها أو إرسالها إلى الشبكة. مع زيادة أخرى في تيار الإثارة، سيكون مكون الجهد مساوياً لـ –E 0 11، والتيار I 11 سوف يدفع ناقل جهد الشبكة بزاوية φ 1. يتوافق هذا الوضع مع الوضع المفرط. سيكون المكون التفاعلي للتيار سعويًا (يقود المتجه Uc بمقدار 90 0). سيتوافق هذا الوضع مع إطلاق الطاقة التفاعلية في الشبكة. يشبه هذا الوضع توصيل الخزانات الثابتة بالشبكة. 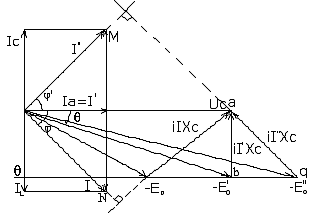
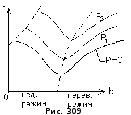
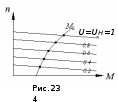
لذلك نرى أنه إذا قمنا بتغيير تيار الإثارة iB، فإن حجم تيار الجزء الثابت سوف يتغير من حيث الحجم والطور، أي. يمكن تعديل cosφ. تحدد هذه الخاصية القيمة استخدام المحركات المتزامنة. تسمى اعتمادات تيار الجزء الثابت I على تيار الإثارة iв، I=f(iв) بخصائص على شكل حرف U، الشكل 1. 309. ص 2 > ص 1 . يتم أخذ الخصائص عند P = const. وضع التشغيل المطابق لتيار الإثارة من 0 إلى الخط المنقط غير متحمس، وبعد الخط المنقط يكون مفرط الإثارة مع إطلاق الطاقة التفاعلية في الشبكة.
![]()
يتم تحديد التحكم في سرعة المحرك وفقًا للمتطلبات العمليات التكنولوجيةوآليات الإنتاج التي تستخدم فيها.
ويتميز بالمؤشرات الرئيسية التالية.نطاق التنظيم د
(حد تغيير السرعة).تُفهم هذه القيمة على أنها نسبة السرعة القصوى للمحرك إلى الحد الأدنى لسرعته.
سلاسة التنظيم
والتي تتميز بحد أدنى من القفز في سرعة المحرك عند الانتقال من خاصية ميكانيكية إلى أخرى.
اتجاه التغيير المحتمل في سرعة المحرك (منطقة التحكم).
يقتصر الحمل المسموح به للمحرك عند التشغيل بخصائص التحكم الخاصة به على حجم التيارات في دوائر الجزء الثابت والدوار. يتم تحديد هذا الحمل من خلال التسخين المسموح به للمحرك ويتم تحديده إلى حد كبير من خلال الخصائص الميكانيكية لآليات الإنتاج، ولحظة المقاومة على العمود، ولحظة القصور الذاتي للمحرك والآلية، وما إلى ذلك.
يمكن التحكم في سرعة دوران المحركات غير المتزامنة من خلال التأثير عليها من جانب الجزء الثابت أو من جانب الجزء الدوار. وتستخدم جميع الطرق الثلاث على نطاق واسع في الممارسة العملية. دعونا نفكر في هذه الأساليب بمزيد من التفصيل.
تنظيم سرعة الدوران عن طريق تغيير تردد شبكة الإمدادهي طريقة التحكم الأكثر اقتصادا وتسمح لك بالحصول على خصائص ميكانيكية جيدة للمحرك الكهربائي. عندما يتغير تردد شبكة الإمداد، يتغير تردد دوران المجال المغناطيسي للمحرك غير المتزامن.
إن العلاقات بين الجهد المنظم والتردد، مع الأخذ بعين الاعتبار تأثير مقاومة الجزء الثابت، والتغيرات في صلابة الخصائص الميكانيكية، وتشبع الفولاذ، وتدهور نقل الحرارة عند السرعات المنخفضة للدوار الدوار، هي علاقات معقدة للغاية. يمكن استخدام المحولات الكهربائية الدوارة التي تستخدم الآلات الكهربائية أو محولات التردد الثابتة على أجهزة أشباه الموصلات، والتي يتم إنتاجها تجاريًا عن طريق الصناعة، كمصدر للطاقة. الخاصية الإيجابية لتنظيم التردد هي إمكانية التنظيم السلس على نطاق واسع في كلا الاتجاهين للخاصية الطبيعية (بما في ذلك إمكانية تدوير المحرك بتردد أعلى من التردد الاسمي). عند التنظيم، يتم ضمان صلابة الخصائص وقدرة التحميل الزائد العالية. ومع ذلك، في عدد من الحالات، في محركات آلات تشغيل المعادن، والمغازل الكهربائية، والمنافيخ القوية والآليات الأخرى، يكون تنظيم التردد هو الأكثر ملاءمة.
التحكم في السرعة عن طريق تغيير عدد الأقطابفي لف الجزء الثابت يتم ضمانه عن طريق تغيير تردد دوران المجال المغناطيسي للجزء الثابت. عند تردد ثابت لشبكة الإمداد، يتغير تردد دوران المجال المغناطيسي وسرعة الدوار التي تحددها بشكل عكسي مع عدد الأعمدة. نظرًا لأن عدد الأعمدة المثبتة في الخطوات يمكن أن يساوي 2، 4، 6، 8، 10، وما إلى ذلك، والتي، مع تردد شبكة إمداد يبلغ 50 هرتز، تتوافق مع سرعة دوران متزامنة تبلغ 3000، 1500، 1000 ، 750، 600 دورة في الدقيقة / دقيقة، وما إلى ذلك، عندها يمكن تحقيق التحكم في الخطوة فقط باستخدام هذه الطريقة.
باستثناء سرعتين المحركات غير المتزامنةتم استخدام محركات ثلاثية وأربع سرعات. تحتوي المحركات ثلاثية السرعات على ملف واحد قابل للتحويل والآخر غير قابل للتحويل، بينما تحتوي المحركات رباعية السرعات على ملفين قابلين للتحويل، مما يسمح بأربع سرعات متزامنة، على سبيل المثال 3000/1500/1000/500 دورة في الدقيقة. المحركات مع تبديل عدد أزواج القطب، كقاعدة عامة، لديها دوار قفص السنجاب مع لف قفص السنجاب. يسمح هذا الدوار بالتشغيل دون إعادة توصيل إضافية في دائرته. في حالة الدوار الملفوف في المحركات متعددة السرعات، سيكون التبديل مطلوبًا في وقت واحد على الجزء الثابت والدوار، مما قد يؤدي إلى تعقيد تصميم الدوار وتشغيل هذه الآلات. تشمل المؤشرات الإيجابية للمحركات غير المتزامنة متعددة السرعات الكفاءة ومجموعة كبيرة نسبيًا من التحكم في سرعة الدوار. عيب طريقة التحكم هذه هو استحالة تغيير سرعة الدوران المذكورة أعلاه بسلاسة.
كما ذكرنا، في إطار سلسلة صناعية عامة واحدة من المحركات غير المتزامنة 4A، يتم إنتاج تعديل للمحركات متعددة السرعات المصممة للعمل بسرعتين أو ثلاث أو أربع سرعات. يعد تنظيم سرعة الدوران عن طريق تغيير الانزلاق أحد الإجراءات طرق بسيطةأنظمة. في الوقت نفسه، عندما يتغير الانزلاق (يزداد)، تتغير الخسائر في لف الدوار (تزيد)، مما يؤدي إلى انخفاض الكفاءة أثناء التنظيم.
تنظيم الانزلاقيمكن تنفيذها من جانب الجزء الثابت ومن جانب الدوار. وبطبيعة الحال، في الحالة الثانية، يجب أن يكون الدوار طورًا وأن يكون له ملف متصل بحلقات الانزلاق. عند تنظيمه من جانب الجزء الثابت، يتغير الجهد المطبق على الملف. زيادة الجهد فوق الجهد المقنن يؤدي إلى تشبع الدائرة المغناطيسية للمحرك وبالتالي لا يستخدم.
لتنظيم سرعة الدوران، قم بتقليل جهد الإمداد. في هذه الحالة، يتغير عزم الدوران الناتج عن المحرك بما يتناسب مع مربع الجهد وتتغير الخصائص الميكانيكية للمحرك وفقًا لذلك، ونتيجة لذلك تتغير أيضًا قيم زلات العمل. عند التنظيم من جانب الدوار، يتم استخدام التحكم في السرعة المتغيرة بشكل أساسي عن طريق إدخال مقاومات نشطة إضافية (مقاومات) في دائرة لف الدوار. من المهم ملاحظة أن التغيير في سرعة المحرك على نطاق واسع باستخدام طريقة التحكم هذه لن يؤدي إلى تغيير في عزم الدوران الأقصى (الحرج). وبالتالي، فإن سعة التحميل الزائد للمحرك لا تنخفض أثناء التنظيم.
هناك مواقف في التركيبات الكهربائية حيث من المستحيل الاستغناء عن محرك كهربائي يعمل بالتيار المباشر. هذا المحرك الكهربائي هو الذي يمكن تعديله وفقًا لسرعة دوران الدوار المطلوبة في التركيبات الكهربائية. صحيح أن لها عيوبًا كثيرة وأحدها هو التآكل السريع للفرش إذا تم تركيبها بثني وعمر الخدمة الخاص بها قصير جدًا. عند ارتدائه، يحدث شرارة، لذلك لا يمكن استخدام هذا المحرك في المناطق المتفجرة والمتربة. بالإضافة إلى ذلك، فإن المحرك الكهربائي الذي يعمل بالتيار المستمر مكلف. لتغيير هذا الوضع، يتم استخدام محرك غير متزامن و منظم الترددلمحرك غير متزامن.
في جميع النواحي تقريبًا، تتفوق المحركات الكهربائية التي تعمل بالتيار المتردد على نظيراتها التي تعمل بالتيار المستمر. أولا، هم أكثر موثوقية. ثانيا، لديهم أبعاد ووزن أصغر. ثالثا، السعر أقل. رابعا، فهي أسهل في التشغيل والاتصال.
ولكن لديهم عيب واحد - صعوبة تنظيم سرعة الدوران. في هذه الحالة، لن تعمل هنا الطرق القياسية لتنظيم تردد المحركات غير المتزامنة، وهي تغيير الجهد وضبط المقاومة وما إلى ذلك. التحكم في التردد غير متزامن محرك كهربائي- كانت المشكلة رقم واحد. رغم أن الأساس النظري معروف منذ ثلاثينيات القرن الماضي. كانت المشكلة برمتها تكمن في التكلفة العالية لمحول التردد. تغير كل شيء عندما تم اختراع الدوائر الدقيقة، والتي أصبح من الممكن من خلالها تجميع محول التردد من خلال الترانزستورات بأقل تكلفة.
مبدأ التنظيم
لذلك، تعتمد طريقة تنظيم سرعة دوران المحرك غير المتزامن على صيغة واحدة. ها هي أدناه.
ω=2πf/p، حيث
- ω – السرعة الزاوية لدوران الجزء الثابت؛
- و - تردد جهد الدخل.
- ع - عدد أزواج القطب.
أي أنه اتضح أنه لا يمكنك تغيير سرعة دوران المحرك الكهربائي إلا عن طريق تغيير تردد الجهد. ماذا يعني هذا في الممارسة العملية؟ الأول هو التشغيل السلس للمحرك، وسيتم الشعور بذلك بشكل خاص عند بدء تشغيل الجهاز، عندما يعمل المحرك نفسه تحت أعلى الأحمال. والثاني هو زيادة الانزلاق. ونتيجة لذلك، يتم تقليل زيادة الكفاءة وفقدان الطاقة.
هيكل تحكم التردد
جميع محولات التردد الحديثة مبنية على مبدأ ما يسمى بالتحويل المزدوج. إنه، تكييفيتم تحويله إلى DC من خلال مقوم ومرشح غير متحكم فيه. بعد ذلك، من خلال العاكس النبضي (وهو ثلاث مراحل)، يحدث التحويل العكسي للتيار المباشر إلى تيار متردد. يتكون العاكس نفسه من ستة مفاتيح طاقة (ترانزستور). لذلك، يتم توصيل كل لف المحرك الكهربائي بمفاتيح مقوم معينة (إيجابية أو سلبية). إنه العاكس الذي يغير تردد الجهد المطبق على اللفات الثابتة. في الواقع، من خلاله يتم تنظيم تردد المحرك الكهربائي.

في هذا الجهاز، يتم تثبيت ترانزستورات الطاقة عند الإخراج. أنها بمثابة المفاتيح. إذا قارناها بالثايرستور، تجدر الإشارة إلى أن الأول ينتج إشارة على شكل جيبية. بالضبط هذا النموذجيخلق الحد الأدنى من التشويه.
الآن مبدأ تشغيل محول التردد. لفهم ذلك، نقترح النظر إلى الشكل أدناه.
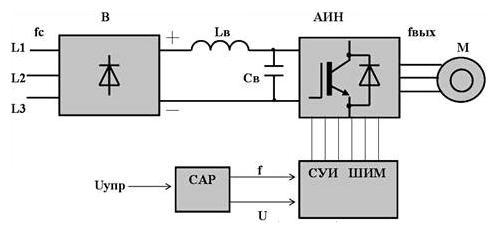
لذلك، دعونا نذهب من خلال الصورة، حيث
- "B" هو مقوم طاقة من نوع الصمام الثنائي غير متحكم فيه.
- "AIN" هو عاكس مستقل.
- "SUI PWM" هو نظام تحكم بعرض النبضة.
- "SAR" هو نظام تحكم آلي.
- "Св" - مكثف المرشح.
- "Lв" - دواسة الوقود.
يوضح الرسم البياني بوضوح أن العاكس ينظم تردد الجهد باستخدام نظام التحكم في عرض النبضة (وهو عالي التردد). هذا الجزء من المنظم هو المسؤول عن توصيل اللفات الثابتة للمحرك الكهربائي بالتناوب مع القطب الموجب للمقوم، ثم إلى القطب السالب. تردد الاتصال بالقطبين يتبع منحنى جيبي. في هذه الحالة، يتم تحديد تردد النبض بدقة من خلال تردد PWM. هذه هي الطريقة التي يحدث بها تنظيم التردد.