تغيير سرعة دوران محرك غير متزامن. تنظيم سرعة دوران المحركات الكهربائية غير المتزامنة
1. طرق التنظيم محرك غير متزامن
2. تنظيم تردد المحركات الكهربائية غير المتزامنة
3. تنظيم السرعة والتيار وعزم الدوران باستخدام المقاومات في دوائر الجزء الثابت والدوار
4. تنظيم سرعة ضغط الدم عن طريق تغيير عدد أزواج الأقطاب 1. طرق تنظيم المحرك غير المتزامن
المحرك غير المتزامن هو الأكثر شعبية محرك كهربائي. يتم إنتاج هذه المحركات بقدرة تتراوح من 0.1 كيلو واط إلى عدة آلاف كيلووات وتستخدم في جميع قطاعات الاقتصاد. الميزة الرئيسية للمحرك غير المتزامن هي بساطة تصميمه وتكلفته المنخفضة. ومع ذلك، وفقا لمبدأ تشغيله، فإن المحرك غير المتزامن في دائرة التبديل التقليدية لا يسمح بتنظيم سرعة دورانه. يجب إيلاء اهتمام خاص لحقيقة أنه من أجل تجنب فقدان الطاقة بشكل كبير، وبالتالي، بالنسبة للمحركات غير المتزامنة ذات القفص السنجابي لتجنب ارتفاع درجة حرارة الدوار، يجب أن يعمل المحرك في وضع طويل المدى مع الحد الأدنى من قيم الانزلاق.
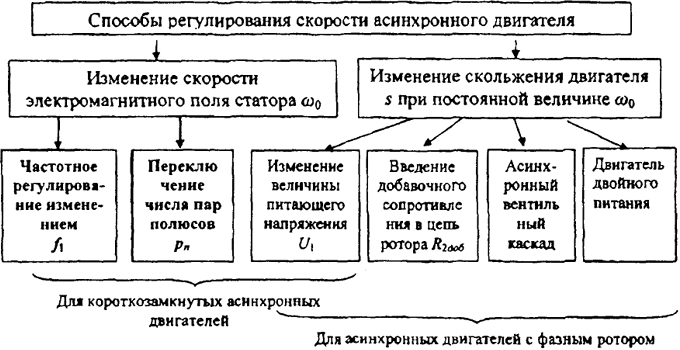
دعونا نفكر في الطرق الممكنة لتنظيم سرعة المحركات غير المتزامنة (انظر الشكل 1). يتم تحديد سرعة المحرك من خلال معلمتين: سرعة دوران المحرك الكهربائي حقل مغناطيسيالجزء الثابت ω0 والانزلاق s:
 رسم بياني 1. تصنيف طرق تنظيم المحركات غير المتزامنة
رسم بياني 1. تصنيف طرق تنظيم المحركات غير المتزامنة
بناءً على (1)، هناك طريقتان ممكنتان للتحكم في السرعة بشكل أساسي: تنظيم سرعة دوران مجال الجزء الثابت وتنظيم الانزلاق بقيمة ثابتة قدرها ω0.
يتم تحديد سرعة دوران مجال الجزء الثابت من خلال معلمتين (انظر 3.3): تردد الجهد الموفر لملفات الجزء الثابت f1، وعدد أزواج أقطاب المحرك rp. وفقًا لهذا، هناك طريقتان ممكنتان للتحكم في السرعة: تغيير تردد جهد الإمداد باستخدام محولات التردد المضمنة في دائرة الجزء الثابت للمحرك (تنظيم التردد)، وعن طريق تغيير عدد أزواج أقطاب المحرك.
يمكن تنظيم انزلاق المحرك بسرعة دوران ثابتة لمجال الجزء الثابت للمحركات غير المتزامنة ذات القفص السنجابي عن طريق تغيير حجم جهد الجزء الثابت عند تردد ثابت لهذا الجهد. بالنسبة للمحركات غير المتزامنة ذات الدوار المجروح، بالإضافة إلى ذلك، هناك طريقتان أخريان ممكنتان: إدخال مقاومات إضافية في دائرة الدوار (التنظيم المتغير) وإدخال emf إضافي قابل للتعديل في دائرة الدوار. من خلال محولات التردد المتصلة بالدائرة الدوارة (سلسلة الصمامات غير المتزامنة والمحرك ثنائي التغذية).
حاليا، بفضل تطوير تكنولوجيا تحويل الطاقة، تم إنشاؤها وإنتاجها بكميات كبيرة أنواع مختلفةمحولات تردد أشباه الموصلات، والتي حددت التطور السريع والاستخدام الواسع النطاق للمحركات الكهربائية غير المتزامنة التي يتم التحكم فيها بالتردد. المزايا الرئيسية لنظام القيادة الكهربائية المتغيرة هي:
التحكم السلس والصلابة العالية للخصائص الميكانيكية، مما يسمح لك بضبط السرعة على نطاق واسع؛
التنظيم الاقتصادي، ويتحدد من خلال أن المحرك يعمل بقيم قليلة من الانزلاق المطلق، كما أن الخسائر في المحرك لا تتجاوز القيمة الاسمية.
تتمثل عيوب تنظيم التردد في التعقيد والتكلفة العالية (خاصة بالنسبة لمحركات الأقراص عالية الطاقة) لمحولات التردد وصعوبة تنفيذ وضع الكبح المتجدد في معظم الدوائر.
تتم مناقشة مبادئ ومخططات التحكم في التردد لسرعة المحرك غير المتزامن بالتفصيل أدناه.
يتيح لك تغيير السرعة عن طريق تبديل عدد أزواج الأقطاب للمحرك غير المتزامن الحصول على عدة قيم لسرعة التشغيل (من 2 إلى 4)، أي. من المستحيل التحكم السلس في السرعة وتشكيل العمليات العابرة باستخدام هذه الطريقة.
ولذلك، فإن هذه الطريقة لها مجالات معينة من التطبيق، ولكن لا يمكن اعتبارها أساسًا لبناء أنظمة قيادة كهربائية يمكن التحكم فيها.
2. تنظيم تردد المحركات الكهربائية غير المتزامنة
إن الإمكانية الأساسية لتنظيم السرعة الزاوية للمحرك غير المتزامن عن طريق تغيير تردد جهد الإمداد تأتي من الصيغة ω = 2πf1 (1 - s)/p. عند تنظيم التردد، هناك أيضًا حاجة لتنظيم سعة جهد المصدر، والذي يتبع من التعبير U1 ≈ E1 = kФf1. إذا تغير التردد عند جهد ثابت، فإن التدفق سوف يتغير عكسيا مع التردد. لذلك، مع انخفاض التردد، سيزيد التدفق، وهذا سيؤدي إلى تشبع فولاذ الماكينة، ونتيجة لذلك، إلى زيادة حادة في التيار وزيادة في درجة حرارة المحرك؛ ومع زيادة التردد، سيقل التدفق، ونتيجة لذلك، سينخفض عزم الدوران المسموح به.
لتحقيق أفضل استخدام للمحرك غير المتزامن عند تنظيم السرعة الزاوية عن طريق تغيير التردد، من الضروري تنظيم الجهد في وقت واحد كدالة للتردد والحمل، وهو أمر ممكن فقط في أنظمة القيادة الكهربائية المغلقة. في أنظمة الحلقة المفتوحة، يتم تنظيم الجهد فقط كدالة للتردد وفقًا لقانون معين، اعتمادًا على نوع الحمل.
تنظيم تردد السرعة الزاوية للمحركات الكهربائية التيار المتناوبمع محركات مع الدوار قفص السنجابيتم استخدامه بشكل متزايد في مختلف فروع التكنولوجيا. على سبيل المثال، في منشآت صناعة النسيج، حيث بمساعدة محول تردد واحد يغذي مجموعة من المحركات غير المتزامنة في نفس الظروف، يتم تنظيم سرعاتها الزاوية بسلاسة وفي وقت واحد. مثال على تركيب آخر بمحركات غير متزامنة يتم التحكم فيها بالتردد مع دوار قفص السنجاب هو طاولات نقل الأسطوانة في الصناعة المعدنية، وبعض الناقلات، وما إلى ذلك.
يتم استخدام التحكم في التردد للسرعة الزاوية للمحركات غير المتزامنة على نطاق واسع في التركيبات الفردية عندما تكون هناك حاجة إلى سرعات زاوية عالية جدًا (لتشغيل المغازل الكهربائية في آلات قطع المعادن بسرعة دوران تصل إلى 20000 دورة في الدقيقة).
تعتبر الفوائد الاقتصادية لتنظيم التردد ذات أهمية خاصة بالنسبة لمحركات الأقراص التي تعمل في الوضع المتقطع، حيث يوجد تغيير متكرر في اتجاه الدوران مع الكبح الشديد.
لتنفيذ التحكم في تردد السرعة الزاوية، يتم استخدام المحولات، التي يغير خرجها كلاً من التردد وسعة الجهد وفقًا للنسبة المطلوبة أو بشكل مستقل. يمكن تقسيم محولات التردد إلى آلات كهربائية وأخرى ذات صمامات. وفي المقابل، يمكن إجراء محولات الآلات الكهربائية باستخدام وصلة وسيطة التيار المباشروالتواصل المباشر. يستخدم الأخير آلة تجميع التيار المتردد، والتي يتم توفير مدخلاتها AC الجهدبتردد وسعة ثابتين، وعند خرجها جهد مع تردد قابل للتعديلوالسعة. محولات الآلات الكهربائية ذات التوصيل المباشر تطبيق عمليلم استلم.
3. التحكم في السرعة والتيار وعزم الدوران باستخدام المقاومات في دوائر الجزء الثابت والدوار
يتم تشغيل معظم المضخات بواسطة المحركات الكهربائية غير المتزامنةوهذا يعني أن المحركات تساهم في الكفاءة الشاملة لنظام الضخ.
تستكشف هذه المقالة الجوانب الرئيسية لكفاءة المحرك التي تخضع لتحكم المستخدم. يتم استهلاك ثلثي إجمالي الكهرباء المولدة بواسطة المحركات الكهربائية، والتي تستخدم في المعدات المختلفة في المواقع الصناعية حول العالم.
لقد تطورت المحركات الكهربائية على مدار الـ 150 عامًا الماضية. على الرغم من وجود مجموعة كبيرة من تصميمات المحركات المختلفة (على سبيل المثال، متزامن أو غير متزامن أو DC)، فإن المحرك غير المتزامن الأكثر استخدامًا في الصناعة اليوم هو المحرك غير المتزامن AC، لأنه هو أكثر موثوقية. كما يفضل استخدام محرك كهربائي غير متزامن عند استخدام محول التردد. إن الكفاءة العالية الكافية جنبًا إلى جنب مع سهولة التصنيع والموثوقية العالية والسعر المنخفض تجعله أكثر أنواع المحركات استخدامًا في جميع أنحاء العالم.
الشكل 1: المحرك التعريفي على شكل قفص السنجاب
يوضح الشكل 1 مخططًا نموذجيًا للمحرك التعريفي مع ثلاث ملفات للجزء الثابت مرتبة حول القلب. يتكون لف الدوار من قضبان من النحاس أو الألومنيوم، نهاياتها قصيرة الدائرة بحلقات. يتم عزل الحلقات عن الدوار. تستخدم مجموعة المحامل عادةً محامل كروية مشحمة، باستثناء المحركات الكبيرة جدًا. يمكن أن يؤدي تشحيم رذاذ الزيت إلى زيادة عمر المحمل بشكل كبير. تستخدم جميع المحركات الحثية تيارًا ثلاثي الطور، باستثناء العمليات الصناعية الصغيرة (أقل من 2 حصان). لبدء تشغيل محركات الطور، هناك حاجة إلى وسائل أخرى، مثل الفرش أو بدء تشغيل مكثف (باستخدام مكثف أثناء بدء التشغيل).
مشكلة في كفاءة المحرك
عند استخدام محرك كهربائي لقيادة المضخة، فإن فقدان الطاقة وانخفاض الضغط الناتج عن عدم كفاءة المضخة عادة ما يكون أكبر بكثير من فقدان الطاقة المرتبط بعدم كفاءة المحرك، ولكنه لا يمكن إهماله. تحسين كفاءة محرك المضخة يمكن أن يوفر وفورات حقيقية في تكلفة الدورة على مدار عمر المضخة/المحرك. العوامل الرئيسية التي تؤثر على كفاءة المحرك التعريفي هي:
- الحمل النسبي للمحرك (المحركات كبيرة الحجم تحت الحمل)
- سرعة الدوران (عدد الأعمدة)
- حجم المحرك (الطاقة المقدرة)
- فئة المحرك: الكفاءة العادية مقابل كفاءة الطاقة مقابل الكفاءة العادية كفاءة عالية
كما هو مبين في الشكل 2، فإن كفاءة المحرك التحريضي تختلف باختلاف
الحمل النسبي على المحرك الكهربائي مقارنة بالخاصية المقدرة. حتى 50% من الحمل، تظل كفاءة معظم المحركات الكهربائية خطية، وفي بعض المحركات الكهربائية تبلغ ذروتها عند 75%. لا يمكن تشغيل المحركات الكهربائية إلا عند حمل أقل من 50% لفترات زمنية قصيرة ولا يمكن تشغيلها عند أحمال أقل من 20% من الحمل المقدر. وبالتالي، عندما تعود الدفاعات أو المضخات المعدلة إلى منحنيات تدفق الرأس، يجب تقييم تأثير الحمل النسبي على المحرك. ![]()
الشكل 2: كفاءة المحرك لمحركات بقوة 100 حصان - منحنيات الأداء النموذجية في نطاق حمل المحرك العادي
سرعة الدوران
ويبين الشكل 2 أيضًا تأثير سرعة الدوران على أقصى قدر من الكفاءة التي يمكن تحقيقها. يصل المحرك الكهربائي رباعي الأقطاب عند 1800 دورة في الدقيقة إلى أعلى كفاءة، وينتج المحرك ثنائي القطب عند 3600 دورة في الدقيقة كفاءة منخفضة. وهكذا، على الرغم من مضخات مع تردد مصنفيمكن أن تكون مضخات 3600 دورة في الدقيقة أكثر كفاءة (وتكلفة شراء أقل) من مضخات 1800 دورة في الدقيقة، ويمكن أن تكون المحركات الكهربائية للأخيرة أكثر كفاءة، بالإضافة إلى أن هذه المضخات تتمتع بشكل عام بـ NPSHR وطاقة شفط أقل، ناهيك عن عمر خدمة أطول. وتجدر الإشارة أيضًا إلى أن تصنيف قوة المحرك الكهربائي يؤثر على كفاءته؛ فالمحركات الكهربائية الكبيرة أكثر كفاءة من المحركات الصغيرة.
سرعة دوران المحرك الكهربائي غير المتزامنأنا
يتم حساب سرعة الدوران المتزامن للمحرك الكهربائي غير المتزامن باستخدام الصيغة التالية:
ن = 120*و/ص
أين:
ن= سرعة الدوران بالدورة في الدقيقة
F= تردد التيار الكهربائي (هرتز)
ص= عدد الأعمدة (الحد الأدنى = 2)
لتنظيم سرعة دوران المحرك الكهربائي دون استخدام الأجهزة الميكانيكية الخارجية، من الضروري تنظيم الجهد والتردد للتيار المزود. يمكن تصنيع بعض المحركات الكهربائية بلفات متعددة (عدد الأقطاب) لتحقيق سرعتين دوران مختلفتين أو أكثر.
تدور المحركات الكهربائية غير المتزامنة بسرعة أقل من سرعة دوران المجال المغناطيسي (بنسبة 1-3% عند التحميل الكامل). يسمى الفرق بين السرعة الفعلية والمتزامنة بالانزلاق. بالنسبة للمحركات الأحدث والأكثر كفاءة في استخدام الطاقة، يميل الانزلاق إلى الانخفاض مقارنة بالمحركات القديمة ذات الكفاءة التقليدية. وهذا يعني أنه بالنسبة لحمل معين، تعمل المحركات الكهربائية الموفرة للطاقة بشكل أسرع قليلاً. 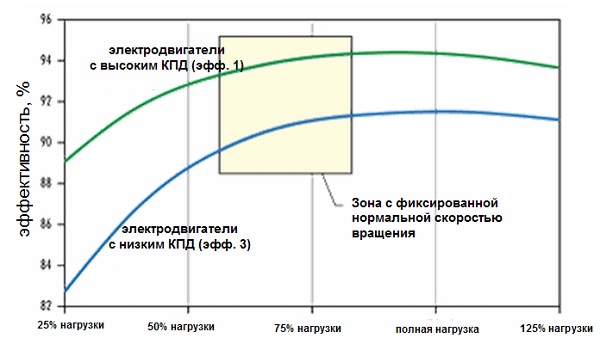
الشكل 3. الكفاءة عند التحميل الكامل والجزئي للمحرك منخفض وعالي الكفاءة
محركات كهربائية عالية الكفاءة
يوضح الشكل 3 مثالاً لكيفية تحسين الكفاءة عند استبدال محرك قديم ذي كفاءة تقليدية بمحرك جديد ذي كفاءة أعلى. كما ذكرنا سابقاً، تعمل المحركات الكهربائية ذات الكفاءة العالية بانزلاق أقل، مما يعطي زيادة طفيفة في سرعة الدوران، وبالتالي يصبح رأس المضخة والإنتاجية أعلى قليلاً.
ومع ذلك، فإن استخدام المحركات الكهربائية عالية الكفاءة في بعض العمليات (متغيرة التغذية) لن يكون له ما يبرره بسبب ارتفاع سرعة الدوران (ورأس المضخة)، طالما أن المحركات الكهربائية الموجودة لا تزال ذات أحمال خفيفة (تعمل بكفاءة منخفضة). ). لأن نظرًا لأن الطاقة المدخلة في عمود المضخة تتناسب مع السرعة المكعبة، فإن مجرد استبدال محرك كهربائي قديم بمحرك جديد ذي كفاءة عالية لن يؤدي بالضرورة إلى تقليل استهلاك الطاقة.
من ناحية أخرى، إذا كان التدفق والضغط الإضافي للمضخة جيدًا، فاستبدل المضخة القديمة
يمكن تبرير محرك كهربائي ذو كفاءة عادية إلى محرك جديد ذو كفاءة عالية.
عامل قوة المحرك
هناك مشكلة أخرى تؤثر على أداء المحرك التعريفي (والتي لها تأثير غير مباشر على استهلاك الطاقة) تسمى " عامل القوى". بعض
تطلب المرافق من العملاء دفع رسوم إضافية مقابل القراءات المنخفضة
عوامل القوة. تحدث الخسائر في الشبكة بسبب انخفاض المعامل
تتطلب الطاقة تيارًا أكبر، مما يؤدي إلى خسائر خطيرة في الطاقة. وكذلك الكفاءة
كما يتناقص عامل القدرة للمحرك الكهربائي مع انخفاض الحمل عليه بشكل خطي تقريبًا إلى ما يقرب من 50٪ من الحمل.
تحديد عامل القدرة:
إزاحة الطور (التأخير) للموجة الجيبية الحالية من موجة جيبية للجهد، مما يوفر طاقة أقل قابلة للاستخدام.
تسبب التحول الحالي المطلوبمغنطة المحرك
يف = باي / كيلو فولت أمبير
أين:
كيلو فولت أمبير = VxIx(3) 0.5 /1000
توضح الصيغة أدناه كيف يؤثر عامل الطاقة على طاقة الإدخال لثلاث مراحل
محرك كهربائي (كيلوواط). لاحظ أنه كلما انخفض عامل الطاقة (كلما زاد تحول طور الجهد الحالي VA)، انخفضت طاقة الإدخال لتيار وجهد دخل معين.
أين:
بي = VxIxPF(3) 0.5 /1,000
باي= مدخلات ثلاثية الطور كيلوواط
الخامس= جهد RMS (متوسط 3 مراحل)
أنا= قيمة RMS للتيار بالأمبير (مأخوذة من 3 مراحل)
الجبهة الوطنية= عامل القدرة ككسر
على الرغم من أن عامل القدرة لا يؤثر بشكل مباشر على كفاءة المحرك الكهربائي، إلا أنه له تأثير على فقد الخطوط، كما ذكرنا أعلاه. ومع ذلك، هناك طرق لزيادة الجبهة الوطنية(عامل القدرة)، وهي:
- شراء المحركات الكهربائية بارتفاع في البداية الجبهة الوطنية
- لا تشتري محركات كهربائية كبيرة جدًا (ينخفض معامل القدرة مع انخفاض
- الحمل على المحرك الكهربائي)
- تركيب المكثفات التعويضية بالتوازي مع اللفات الحركية
- زيادة عامل طاقة الحمل الكامل إلى 95% (الحد الأقصى)
- التحويل إلى محرك التردد المتغير
- يزيد الجبهة الوطنية
- تخفيض تيار رد الفعلمن المعدات الكهربائية إلى الكابلات ومشغلات المحركات الكهربائية، تقليل توليد الحرارة وفقدان الطاقة (كيلوواط).
- مع انخفاض الحمل على المحرك الكهربائي، تزداد إمكانية التوفير، و الجبهة الوطنية
- أقل من 60%-70%. (التوفير المحتمل 10%)
- انخفاض رسوم معامل الطاقة
- زيادة الأداء العام للنظام
- نظام ذكي للتحكم في المحركات
- محرك التردد المتغير
هناك طريقة أخرى لزيادة كفاءة المحرك الكهربائي وهي زيادة جهد التشغيل. كلما ارتفع الجهد، انخفض التيار وبالتالي قلت الخسائر في الشبكة. ومع ذلك، فإن الجهد العالي سوف يزيد من تكلفة VFD ويجعل العملية أكثر خطورة.
الاستنتاجات
لذلك، عندما تحاول تقليل استهلاك الطاقة أنظمة الضخلا تنسى
كفاءة المحرك الكهربائي والعوامل المذكورة أعلاه المؤثرة عليه.
ويترتب على ذلك إمكانية تنظيم سرعة دوران المحركات الكهربائية غير المتزامنة:
تغيير وتيرة العرض الحالي.
تغيير عدد أقطاب لف الجزء الثابت.
إدخال مقاومات إضافية في دائرة لف الدوار.
يتم استخدام الطريقتين الأوليين لتنظيم سرعة دوران المحركات الكهربائية ذات الدوار القفصي السنجابي، ويتم استخدام الطريقة الأخيرة للمحركات الكهربائية ذات الدوار الملفوف (مع حلقات الانزلاق).
نادرًا ما يتم استخدام تنظيم سرعة الدوران عن طريق تغيير تردد تيار الإمداد، نظرًا لأن هذه الطريقة قابلة للتطبيق فقط عندما يتم تشغيل المحرك الكهربائي بواسطة مولد منفصل. في هذه الحالة، لتنظيم السرعة، من الضروري تغيير سرعة دوران مولد الإمداد بنفس النسبة التي يجب أن تتغير بها سرعة المحرك الكهربائي المتحكم فيه. إذا تم تشغيل المحرك الكهربائي من الشبكة ثلاث مراحل الحاليةفمن المستحيل تنظيم سرعته عن طريق تغيير التردد. عملياً، يتم استخدام التحكم في السرعة عن طريق تغيير التردد فقط في... المنشآت الكهربائية للتجديف ذات التيار المتردد، حيث يتم تشغيل محركات التجديف الكهربائية القوية بواسطة مولدات منفصلة وبالتالي يمكن تعديل تردد تيار الإمداد بشكل تعسفي.
في أغلب الأحيان من الناحية العملية، يتم استخدام الطريقة الثانية، مما يجعل من الممكن بكل بساطة التحكم التدريجي في سرعة دوران المحركات الكهربائية غير المتزامنة باستخدام دوار قفص السنجاب. إذا كان من الممكن تغيير عدد أزواج أقطاب ملف الجزء الثابت [انظر. الصيغة (80) ] إذن، من الممكن تنظيم سرعة دوران المحرك الكهربائي تدريجيًا، نظرًا لأن عدد أزواج الأقطاب يمكن أن يساوي 1، 2، 3، إلخ. المحركات الكهربائية التي تسمح بتبديل عدد الأقطاب يجب أن تحتوي الأزواج إما على عدة ملفات مستقلة في فتحات الجزء الثابت، أو ملف واحد مع جهاز تبديل خاص. وتنتج الصناعة المحلية محركات كهربائية ذات سرعتين وثلاث وأربع سرعات، تستخدم بشكل رئيسي في النقل البحري وفي بعض الرافعات. عندما تختلف أعداد الأقطاب بشكل كبير عن بعضها البعض، يتم تصنيع محركات كهربائية ذات محورين بسرعتين مع ملفين مستقلين. واحد، على سبيل المثال، يمكن تنفيذه على 2 ر= 2، والثانية بـ 2 ر= 8 أقطاب. بعد ذلك، عندما يتم توصيل الملف الأول بالشبكة، فإن المجال المغناطيسي للجزء الثابت سوف يدور بسرعة ن 1 = 60·50 / 1 = 3000 عن /دقيقةوعند توصيل الملف الثاني بالشبكة - بسرعة ن 1 = 60·50 / 4 = 750 عن /دقيقة. سوف تتغير سرعة دوران الدوار وفقًا لذلك. ن 2 = ن 1 (1-س).
في كثير من الأحيان، يتم وضع لف واحد في فتحات الجزء الثابت لمحرك كهربائي ثنائي السرعات، ولكنه مصنوع بطريقة يمكن تشغيله في مثلث إذا لزم الأمر (الشكل 49، أ) ونجمة مزدوجة (الشكل 49، ب). عندما يتم توصيل هذا الملف بمثلث، يكون عدد الأقطاب 2 ر = 2أ، وعند تشغيله بنجمة مزدوجة 2 ر = أ(أين أ- أي عدد صحيح)، أي عند الانتقال من المثلث إلى النجم المزدوج، ينخفض عدد أزواج أقطاب الملف الثابت إلى النصف، وتتضاعف سرعة المحرك الكهربائي.
يتم استخدام التنظيم عن طريق تبديل عدد أزواج الأقطاب فقط في المحرك الكهربائي المزود بدوار على شكل قفص سنجابي، لأن المحركات الكهربائية ذات العضو الدوار الملتف تحتوي على واحد
مؤقتا، عند تبديل لف الجزء الثابت، من الضروري تبديل لف الدوار، مما يعقد تصميم المحرك الكهربائي وجهاز التبديل. تعتبر هذه الطريقة للتحكم في السرعة اقتصادية للغاية، ولكنها لا تخلو من عيوبها. على وجه الخصوص، لا يتم التحكم في السرعة بسلاسة، ولكن في القفزات، يلزم وجود جهاز تبديل معقد إلى حد ما، خاصة عندما يكون عدد السرعات أكثر من اثنين؛ عند الانتقال من سرعة إلى أخرى، تنقطع دائرة الجزء الثابت، ولا مفر من صدمات التيار وعزم الدوران؛ يكون عامل الطاقة عند السرعات المنخفضة أقل منه عند السرعات الأعلى بسبب زيادة تبديد التدفق المغناطيسي.
لا يمكن التحكم في السرعة عن طريق إدخال مقاومات إضافية في دائرة الدوار إلا مع المحركات الكهربائية ذات الدوار المجروح. وفقًا للمعادلة (97)، عندما يتم إدخال مقاومات نشطة مختلفة في الدائرة الدوارة، تتغير صلابة الخصائص (الشكل 50)، أي، تحت نفس الحمل، ستكون سرعة المحرك الكهربائي مختلفة. ومن الواضح أنه كلما ارتفعت قيمة المقاومة الإضافية، كلما كانت الخاصية الاصطناعية أكثر ليونة وانخفضت سرعة المحرك الكهربائي.
لنفترض أن المحرك الكهربائي يعمل بسرعة ثابتة. ن 1 على الخصائص الطبيعية أعند هذه النقطة 1 ، تطوير بعض عزم الدوران م 1 = م ج . عند إدخال بعض المقاومة في الدائرة الدوارة ر 1 سوف يتحول المحرك الكهربائي إلى التشغيل وفقًا للخاصية ب، الذي معادلته
نظرًا لأنه في لحظة تشغيل المقاومة، فإن سرعة المحرك الكهربائي لن تتغير عمليا، والانتقال من الخاصية أللتوصيف بسيحدث أفقيا 1 -2 ، وسوف ينخفض عزم دوران المحرك الكهربائي إلى م 2 وهي أقل من لحظة مقاومة الآلية م , وبالتالي فإن سرعة المحرك الكهربائي ستنخفض ويزداد الانزلاق. ومع زيادة الانزلاق يزداد عزم الدوران حسب التعبير (92) حتى يصبح عزم المحرك الكهربائي مساوياً مرة أخرى لحظة مقاومة الآلية، وبعدها يحدث توازن العزوم ويدور المحرك بسرعة جديدة سرعة ثابتة ن 3 (نقطة 3 ).
إذا لزم الأمر، يمكن تضمين مقاومة إضافية ر 2 . ثم ستنخفض سرعة المحرك الكهربائي إلى القيمة ن 5 . عند إيقاف المقاومات، تزداد سرعة المحرك الكهربائي، ويتم الانتقال من خاصية إلى أخرى بالترتيب العكسي، كما هو موضح في الشكل. 50.
تتيح لك الطريقة الأخيرة الحصول على مجموعة واسعة من السرعات، ولكنها غير اقتصادية للغاية، لأنه مع زيادة المقاومة النشطة لدائرة الدوار، يزداد فقدان الطاقة في المحرك الكهربائي، مما يعني انخفاض كفاءته. خاصة بالنسبة للمحركات الكهربائية القوية، فقد تبين أنها ضخمة الحجم وتنبعث منها الكثير من الحرارة.
ويجب أيضًا أن يؤخذ في الاعتبار أن معظم المحركات الكهربائية أصبحت الآن ذاتية التهوية.
ونتيجة لذلك، عندما تنخفض سرعة الدوران، يتدهور التبريد ولا يتمكن المحرك الكهربائي من تطوير عزم الدوران المقدر.
الميزة الرئيسية للمحركات الكهربائية ذات الإثارة المتوازية هي القدرة على تنظيم سرعة دورانها على نطاق واسع وسلاسة.
المعادلات المشتقة فيمميزات محركات التيار المستمر ، أظهر أنه يمكن إجراء الضبط الاصطناعي لسرعة الدوران بثلاث طرق: عن طريق تغيير مقاومة دائرة عضو الإنتاج، وعن طريق تغيير التدفق المغناطيسي، وعن طريق تغيير الجهد المزود إلى عضو الإنتاج.
تنظيم سرعة الدوران عن طريق تغيير مقاومة سلسلة المرساة. لتنظيم سرعة دوران المحرك الكهربائي، يتم توصيل مقاومات إضافية على التوالي إلى دائرة عضو الإنتاج (انظر الشكل. 10 ). المعادلة (30) يوضح أن كل قيمة جديدة للمقاومة الإضافية تتوافق مع المقاومة الاصطناعية الخاصة بها الخصائص الميكانيكية. الأمر نفسه ينطبق على خصائص السرعة. تحليل هذه المعادلة يوضح أن هناك علاقة خطية بين مقاومة سلسلة عضو الإنتاج وسرعة الدوران، أي عند أي قيمة رتظل خصائص المحرك الكهربائي خطية وتمر عبر النقطة عند التباطؤ. ص = ص 0 . من الواضح أنه كلما ارتفعت قيمة المقاومة الإضافية، كلما كانت الخاصية الاصطناعية للمحرك الكهربائي أكثر ليونة (الشكل 12). وهذا يعني أنه عند نفس الحمل، تكون سرعة المحرك الكهربائي أقل، وكلما ارتفعت قيمة المقاومة الإضافية المتضمنة في دائرة عضو الإنتاج. يتم تفسير الانخفاض في السرعة من خلال انخفاض الجهد الإضافي في المقاومة الإضافية.
تتم عملية الانتقال من سرعة إلى أخرى على النحو التالي. لنفترض محركًا كهربائيًا يعمل على تطوير عزم الدوران م = م مع ، يعمل بثبات على الخاصية الطبيعية عند هذه النقطة 1 (الاتصالات 1 ش, 2شو3 شفي التين. 10 مغلقة). إذا كان من الضروري تقليل سرعة دوران المحرك الكهربائي، فافتح جهة الاتصال 1 شوبالتالي إدخال مقاومة إضافية في دائرة عضو الإنتاج ر 1 . وفقا للمعادلة (30)، يجب أن يتحول المحرك الكهربائي إلى الخاصية ب، المقابلة للقيمة الجديدة لمقاومة سلسلة حديد التسليح. يتمتع المحرك الكهربائي بقصور ذاتي كبير، وعند تبديل المقاومة، لا يمكن أن تتغير سرعة دورانه على الفور. لذلك، في اللحظة الأولى، يبدأ المحرك الكهربائي بالعمل عند النقطة المقابلة 2 على الخاصية ب. في هذه الحالة، ينخفض \u200b\u200bتيار عضو الإنتاج وعزم الدوران، وينزعج توازن اللحظات ( م<م ج ) وتبدأ سرعة المحرك الكهربائي في الانخفاض حتى يتم استعادة توازن العزوم من جديد ( م= م مع ). وبالتالي، فإن التشغيل المستقر للمحرك الكهربائي سيكون الآن في هذه النقطة 3 على الخاصية ب.
يحدث الانتقال إلى الخصائص بطريقة مماثلة معو دعندما يتم تشغيل المقاومات ر 2 و ر 3 .
لزيادة سرعة دوران المحرك الكهربائي، من الضروري إيقاف تشغيل جزء من المقاومة الإضافية. على سبيل المثال، إذا كان المحرك الكهربائي يعمل بثبات عند هذه النقطة 7 على الخاصية دثم عندما يتم إيقاف المقاومة ر 3 (عند إغلاق جهات الاتصال 3 ش) هناك انتقال للعمل حسب الخصائص مع. في هذه الحالة، في البداية (عند هذه النقطة 8 ) يزداد تيار وعزم دوران المحرك الكهربائي بشكل حاد وتبدأ السرعة في الزيادة. عند هذه النقطة 5 يتم استعادة توازن اللحظات وتتوقف الزيادة في السرعة. عندما يتم إيقاف تشغيل المراحل المتبقية من التحكم المتغير بشكل تسلسلي، تزيد سرعة الدوران تدريجيًا إلى القيمة ن 1 .
تتميز طريقة تنظيم سرعة الدوران هذه ببساطة الدائرة الكهربائية وتستخدم في كثير من الأحيان نسبيًا للمحركات الكهربائية لآليات الرافعة. ومع ذلك، فإنه لديه أيضا بعض العيوب الهامة. على وجه الخصوص، يكون التحكم في السرعة باستخدام الطريقة المدروسة مصحوبًا بفقدان كبير للطاقة في المقاومة المتغيرة. لذلك يحاولون استخدامه فقط في الحالات التي تكون فيها قوة المحرك الكهربائي منخفضة أو يجب أن يكون الانخفاض في سرعة الدوران قصير المدى. العيب الكبير هو أيضًا الضخامة والتكلفة العالية لمقاومة التحكم ، والتي يجب تصميمها للتيار المقنن للمحرك الكهربائي. وهذا يجبرنا على تقليل عدد مراحل المقاومة المتغيرة وتوفير تدابير خاصة لتبريدها.
تنظيم سرعة الدوران عن طريق تغيير التدفق المغناطيسي. إذا تم توصيل المتغير المتغير على التوالي بدائرة لف الإثارة (انظر الشكل 10)، فإن سرعة دوران المحرك الكهربائي مع الإثارة الموازيةيمكن تعديلها عن طريق تغيير التدفق المغناطيسي. للقيام بذلك، من الضروري تغيير قيمة المقاومة لدائرة الإثارة. يؤدي التغيير في المقاومة إلى تغيير في تيار الإثارة، وبالتالي تغيير في التدفق المغناطيسي للمحرك الكهربائي. من الواضح أنه في حالة عدم وجود مقاومة إضافية في دائرة الإثارة، فإن التدفق المغناطيسي للمحرك الكهربائي له قيمة قصوى. لديها السرعة الطبيعية والخصائص الميكانيكية.
عندما يتم إدخال مقاومة إضافية في دائرة الإثارة، يتناقص التدفق المغناطيسي وتزداد السرعة، وتتوافق السرعة الاصطناعية المختلفة والخصائص الميكانيكية مع قيم مختلفة للتدفق المغناطيسي (الشكل 13). ولا تختلف معادلات هذه الخصائص عن المعادلتين (25) و(29).
ويستنتج من المعادلات أن الخصائص عند قيم مختلفة للتدفق المغناطيسي تظل خطية، علاوة على ذلك، فإن القيم المنخفضة للتدفق المغناطيسي تتوافق مع القيم الأعلى لسرعة الخمول. مع انخفاض التدفق المغناطيسي للإثارة، تقل صلابة خصائص المحرك الكهربائي إلى حد ما، وهو ما يفسره تأثير تفاعل عضو الإنتاج.
كما تبين، في حالة التحكم في السرعة عن طريق تغيير المقاومة في دائرة عضو الإنتاج، يتم الانتقال من خاصية إلى أخرى بسرعة ثابتة تقريبًا. يتم تفسير ذلك من خلال محاثة عضو الإنتاج المنخفضة، والتي بسببها يتغير تيار عضو الإنتاج على الفور تقريبًا.
إن لف الإثارة للمحرك الكهربائي المثير الموازي له محاثة كبيرة. لذلك، في حالة التحكم في السرعة عن طريق تغيير مقاومة دائرة الإثارة، يتم الانتقال من خاصية إلى أخرى وفقًا لما يسمى بالخصائص الديناميكية، والتي يمكن بناؤها نتيجة لحساب العمليات العابرة. في التين. يتم عرض 13 خاصية ديناميكية بخط منقط.
إن تنظيم سرعة دوران المحركات الكهربائية مع الإثارة المتوازية عن طريق تغيير التدفق المغناطيسي يكون مصحوبًا بفقدان بسيط في الطاقة في مقاومة متغيرة التحكم وهو اقتصادي. تتيح لك الخسائر البسيطة استخدام مقاومة متغيرة ذات أبعاد ووزن صغيرين، مع عدد كبير من خطوات التحكم، مما يسمح لك بالحصول على تحكم سلس في السرعة بدون خطوات تقريبًا.
عيب هذه الطريقة للتحكم في السرعة هو تدهور عملية التبديل وانخفاض قدرة التحميل الزائد للمحرك الكهربائي عند السرعات العالية. السرعة باستخدام طريقة التحكم هذه لا يمكن أن تتغير إلا في اتجاه الزيادة مقارنة بالسرعة الاسمية، مما يحد بشكل كبير من استخدام هذه الطريقة. في حالة الأحمال الثقيلة، لا تنطبق طريقة التحكم في السرعة هذه بشكل عام، نظرًا لأن انخفاض التدفق المغناطيسي يقلل من عزم الدوران وقد ينشأ تيار كبير بشكل غير مقبول عند الانتقال إلى سرعة أعلى.
تنظيم سرعة الدوران عن طريق تغيير الجهد عند أطراف المحرك (نظام محرك المولد). لغرض التحكم الواسع والسلس في السرعة، يتم أحيانًا استخدام ما يسمى بنظام المولد المحرك (ويُختصر باسم نظام G-D)، والذي يسمح باستخدام طريقة التحكم في السرعة عن طريق تغيير الجهد الكهربي المزود إلى عضو المحرك الكهربائي . عند تشغيل محرك كهربائي من التيار الكهربائي، فإن هذه الطريقة غير قابلة للتطبيق تمامًا. لا يمكن استخدامه إلا عندما يتم تشغيل المحرك الكهربائي من مولد منفصل.
عادةً، يتكون نظام G-D من محرك دفع بي دي, مولد كهرباء ز مع مسببات الأمراض في والمحرك التنفيذي بطاقة تعريف (الشكل 14). يتم تشغيل محرك الدفع من التيار الكهربائي ويعمل على تشغيل المولد. في أغلب الأحيان، يتم استخدام محرك كهربائي غير متزامن ذو قفص سنجابي كمحرك قيادة، مدعوم بشبكة تيار ثلاثية الطور. وله اتجاه ثابت للدوران، ويدور بسرعة ثابتة. يتلقى المحرك التنفيذي الطاقة من المولد ز وينشط الآلية.
المولد والمحرك التنفيذي لهما إثارة مستقلة. اللفات الميدانية الخاصة بهم OVG و المنشطات الأمفيتامينية تتغذى من مسببات الأمراض في، مولد تيار مستمر صغير مثبت على نفس عمود محرك القيادة بي دي ومولد ز. إذا كانت الدائرة المتعرجةOVG قم بتشغيل مقاومة متغيرة، ثم من خلال تغيير قيمة مقاومتها، يمكنك تغيير سرعة دوران محرك التحكم، لأن هذا سيغير جهد المولد. في الواقع، بالنسبة لدائرة المولد-المحرك، وفقًا لقانون كيرشوف الثاني، يمكن رسم المعادلة التالية:
أين ه ز و ه د - وفقا لذلك e.m.f. مولد ومحرك كهربائي.
ر ز و ر د - على التوالي مقاومة تجهيزات المولد
ومحرك كهربائي. استبدال ه. د.س. محرك كهربائي، حسب التعبير (7). نحن نحصل
التعبير (41) هو معادلة خصائص سرعة المحرك الكهربائي في نظام G-D. باستبدال تيار عضو الإنتاج فيه بالتعبير (28) نحصل على معادلة الخاصية الميكانيكية
وتظهر المعادلتان (41) و (42) ذلك بالتغيير ه ز يمكنك تغيير سرعة دوران محرك التحكم. وبالتالي، مع انخفاض في مقاومة مقاومة متغيرة ر ص ستزداد سرعة المحرك التنفيذي، ومع زيادة المقاومة ستنخفض، حيث أن e. د.س. مولد كهرباء ه ز يعتمد على التيار في اللف OVG.
من السهل أن نرى أن الخصائص الميكانيكية وسرعة المحرك الكهربائي في نظام G-D هي خطوط مستقيمة. يتم تحديد سرعة التباطؤ بواسطة الحد الأول على الجانب الأيمن من المعادلة (41) أو (42) ولا تظل ثابتة عند قيم مقاومة مختلفة ر ر ، أي لكل قيمة مقاومة ر ر يتوافق مع سرعته وخصائصه الميكانيكية (الشكل 15). هذه الخصائص صلبة تمامًا، مما يسمح، عند استخدام محركات كهربائية خاصة قابلة للتعديل، بالحصول على نطاق واسع من السرعات في حدود 1: 100 أو أكثر، وهي إحدى الصفات الإيجابية الرئيسية لنظام G-D.
في بعض الأحيان يتم تضمين مقاومة متغيرة ليس فقط في دائرة اللف OVG, ولكن في دائرة لف الإثارة بطاقة تعريف, مما يجعل من الممكن ضبط السرعة من السرعة الاسمية.
يعد التحكم في السرعة باستخدام نظام G-D اقتصاديًا للغاية، نظرًا لأن جميع عمليات التبديل تتم في دوائر لف المجال، حيث تكون التيارات صغيرة نسبيًا. تتيح القوى والأبعاد الصغيرة نسبيًا لمقاومات التحكم الحصول على عدد كبير من خطوات التحكم، وبالتالي التحكم السلس في السرعة إلى حد ما. من الممكن أيضًا استخدام مقاومة متغيرة مع جهات اتصال منزلقة، مما يسمح بالتحكم في السرعة بدون خطوات.
يعد نظام G-D مريحًا للغاية ليس فقط من حيث اتساع وسلاسة التحكم في السرعة. كما أنه يجعل من السهل جدًا عكس المحرك الميكانيكي وفرامله. لذلك، للقيام بالعكس، من الضروري، كما هو معروف، تغيير القطبية عند أطراف المحرك للمحرك الكهربائي. للقيام بذلك، يكفي تغيير اتجاه التيار في اللف OVG (أو في اللف المنشطات الأمفيتامينية). لأداء الكبح، يكفي فصل اللف عن المثير OVG. الحجم الصغير لمقاومات التحكم يجعل من الممكن استخدام جهاز التحكم عن بعد لنظام G-D على نطاق واسع، وهو ما يعد أيضًا ميزة كبيرة له.
العيب الرئيسي لنظام محرك المولد هو العدد الكبير من الآلات الكهربائية، والتكلفة العالية وكفاءة التركيب المنخفضة نسبيًا، مما يحد بشكل طبيعي من نطاق تطبيق نظام المولد.